Дипломная работа: Розробка датчика температур на акустичних хвилях
ВСТУП
Автоматизація різних технологічних процесів, ефективне
керування різними агрегатами, машинами, механізмами вимагають численних вимірів
різноманітних фізичних величин. У цей час існує приблизно наступний розподіл
частки вимірів різних фізичних величин у промисловості: температура - 50%, витрата
(масовий і об'ємний) - 15%, тиск - 10%, рівень - 5%, кількість (маса, обсяг) -
5%, час - 4%, електричні й магнітні величини - менш 4%. Із цього розподілу
наочно видно, що в сучасному промисловому виробництві найпоширенішими є виміри
температури. Широкий діапазон вимірюваних температур, розмаїтість умов
використання засобів вимірів і вимог до них визначають, з одного боку,
різноманіття застосовуваних засобів виміру температури, а з іншого боку,
необхідність розробки нових типів первинних перетворювачів і датчиків, що
задовольняють зростаючим вимогам до точності, швидкодії.
Вимірювальні перетворювачі на пасивних елементах (акустичні датчики) з
розвитком автомобільної індустрії й індустрії телекомунікацій здобувають все
більшу актуальність. Такі прилади будуються на фільтрах акустичних хвиль,
комерційне використання яких почалося більше 60 років тому. Тільки в
телекомунікаціях - у мобільних телефонах і на базових станціях - щорічна
потреба в цих фільтрах близько 3 мільярдів. Ці прилади працюють із поверхневими
акустичними хвилями й служать у передавачах полосними фільтрами як проміжних
частот, так і частот радіохвиль. Крім того, акустичні датчики застосовуються в
автомобільній індустрії (датчики крутного моменту й тиску в шині), медицині
(хімічні датчики) і багатьох інших сферах (як датчики вологості, температури й
т.д.). Причини такого широкого використання цієї технології в промисловості -
невисока вартість, надійність, чутливість і витривалість приладів. Крім того,
деяким з них не потрібні джерела живлення.
1. ДАТЧИКИ ТЕМПЕРАТУРИ ТА ЇХ КЛАСИФІКАЦІЯ
1.1 Датчик температури
В основі роботи будь-яких
температурних датчиків, що використовуються в системах автоматичного керування,
лежить принцип перетворення вимірюваної температури в електричну величину. Це
обумовлено наступними позитивними характеристиками електричних вимірів:
електричні величини зручно передавати на відстань, причому передача
здійснюється з високою швидкістю; електричні величини універсальні в тому
розумінні, що будь-які інші величини можуть бути перетворені в електричні й
навпаки; вони точно перетворяться в цифровий код і дозволяють досягти високої
точності, чутливості й швидкодії засобів вимірів.
Акустичні датчики засновані
на залежності швидкості поширення звуку в газах від їхньої температури й
використовуються в основному діапазоні середніх і високих температур.
Акустичний термометр містить просторово рознесені випромінювач акустичних хвиль
і їхній приймач, що включаються звичайно в ланцюг автогенератора, частота
коливань якого міняється зі зміною температури; звичайно такий датчик
використовує й різного типу резонатори.
Датчик температури являє
собою пластинку кварцу, поміщену в сталевий корпус, заповнений гелієм для
збільшення теплової провідності між кварцом і корпусом датчика. П'єзоелектричний
кварц характеризується тим, що головна площина пластинки перпендикулярна
електричної осі. У цьому випадку спостерігається поява зарядів протилежного
знака на протилежних поверхнях пластинки при додатку сили по нормалі до них. Це
явище називається прямим п'єзоелектричним ефектом. При додатку до протилежних
поверхонь пластинки різниці потенціалів відбувається зміна товщини пластинки
(розтягання або стиск) залежно від знака різниці потенціалів. Це явище
називається зворотним п'єзоелектричним ефектом. П'єзоелектричний ефект
експериментально був відкритий братами Кюрі.
Якщо до протилежних поверхонь
пластинки прикласти змінну різницю потенціалів, частота якої буде періодично
змінюватись, виникає явище електромеханічного резонансу, що супроводжується
періодичним перетворенням механічної енергії в електричну й назад з дуже малими
втратами.
Орієнтація пластинки щодо
осей кристала визначає її зріз.
Електроди, за допомогою яких підводить різниця потенціалів до пластинки,
можуть бути напиляні у вакуумі або виконані із двох притиснутих до пластинки
шматочків фольги.
Поблизу однієї із цих резонансних частот механічних коливань пластинка
кварцу з електричної точки зору являє собою двухполюсник, що складається із
двох паралельних галузей.
Параметри L, С, R визначаються геометричними, механічними й
кристалографічними характеристиками пластинки; С – обумовлено наявністю металевих електродів
(рис. 1.1).
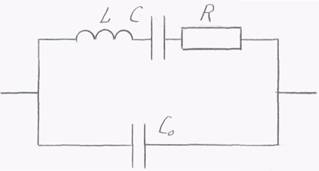
Рисунок 1.1
Є два ланцюги електричного
резонансу:
а) послідовна 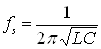
б) паралельна 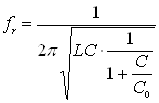
Кварцова пластинка з активним
елементом утворять у сукупності генератор, що створює вимірювальний сигнал ет.
де  , якщо Те = 0°С
, якщо Те = 0°С
Кварцовий генератор опорної
частоти створює сигнал еr із частотою  , що практично не залежить від
температури навколишнього середовища:
, що практично не залежить від
температури навколишнього середовища:

Сигнали ет й еr
надходять на вхід перетворення частоти, наприклад, множителя, на виході якого
знімається напруга и'о

За допомогою низькочастотного
фільтра відтинаються ' верхні частоти, що враховують членом
 і тоді
і тоді

Визначивши за допомогою
частотоміра величину  й знаючи S можна знайти
температуру
й знаючи S можна знайти
температуру

1.2 Класифікація термодатчиків
Оскільки інформація про нові типи вимірювачів не завжди є повною та
містить комерційну таємницю, для визначення сучасного рівня та основних орієнтирів
у розробці таких датчиків скористаємось відомостями про класичні серійні
термодатчики, якими є термометри опору. Згідно ГОСТ 6651-78 термометр опору
використовується для перетворення температури в діапазоні -200...+1100 С в
опір.
Найчастіше використовуються термоопори 3-х типів:
- платинові (ТОП)
- мідні (ТОМ)
- напівпровідникові (ТОП)
Платинові ТЕ мають високостабільний температурний коефіцієнт опору ТКО,
гарну відтворюваність властивостей.
Функція перетворення ТОП має вигляд.
Платина:
RT=R0(1+AT+BT2), при TЄ(0 ÷ 650) ˚С
R0- опір при Т0=0˚С;
Т- поточна вимірювана температура, ˚С;
А=3,90784х10-3К-1;
В=5,7841х10-7К-2;
RT=R0[1+AT+BT2+C(T-100)T3],
при TЄ(-200…0)˚С, де С=-4,482х10-12К-4.
Мідні ТО широко поширені завдяки своїй дешевині й лінійній залежності ТКО
від температури.
Мідь:
RT=R0(1+αRхТ), при TЄ(-50…200)˚С ;
αR=4,26х10-3ДО-1 –ТКО першого порядку мідного
ТЕ;
R0- опір при Т0=0˚С;
Т- поточна вимірювана температура, ˚С;
Напівпровідникові терморезистори відрізняються від металевих меншими
габаритами й більшими значеннями ТКО.
ТКО напівпровідникових терморезисторів негативний і зменшується
зворотньопропорційно квадрату абсолютної температури: α=В/Т2.
При 20˚С ТКО становить 0,02 ÷ 0,08 К-1.
Температурна залежність опору ТСП (рис. 1.2 крива 2) досить добре
описується формулою Rθ=AeВ/T, де Т – абсолютна
температура, А – коефіцієнт, що має розмірність опору, В - коефіцієнт, що має
розмірність температури. На рис.3 для порівняння наведено температурну
залежність для мідного терморезистора (пряма 1).
Якщо для використаного перетворювача не відомі коефіцієнти А и В, алі
відомі опори R1 й R2 при Т1 і Т2,
то опір і коефіцієнт В для будь-якої іншої температури можна визначити зі
співвідношень:
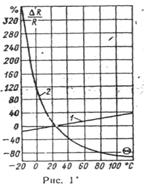
Рисунок 1.2
Недоліками напівпровідникових терморезисторів, що істотно знижують їхні
експлуатаційні якості, є нелінійність залежності опору від температури (рис. 1.2)
і значний розкид від зразка до зразка як номінального опору, так і постійної В.
1.3 Конструкції й технічні характеристики сучасних датчиків
По конструктивному виконанню металеві, мідні й платинові ТО діляться на
дві великі групи:
- средовищні (що занурюють) ТО, призначені для внутрішнього вимірювання
температури рідких, газоподібних і сипучих середовищ у різних галузях техніки;
- поверхневі ТО, призначені для виміру температури поверхні твердих тіл
на які безпосередньо встановлений ТО.
Конструкція термометра опору типу ТОП-6097, призначеного для вимірювання
температури газоподібних або рідких хімічно неагресивних й агресивних середовищ
у діапазоні від -50 до +250 , показана на рис.1.3. Чутливий елемент 1
платинового термометра являє собою керамічний каркас, у канали якого поміщено
спіраль із платинового дроту. Кінці спирали приварені до виводів, через які
чутливий елемент з'єднаний із трьохжильним кабелем. Канали каркаса засипані
керамічним порошком й герметичні. Захисна арматура 2 термометра являє собою
зварну конструкцію зі сталевої сурми й штуцера. Місце сполучення чутливого
елемента з кабелем закривається ковпаком 4 із прес-матеріалу АГ-4В, угвинченим
у верхню частину штуцера 3, і заливається компаундом.
Показники теплової інерційності промислових термометрів становлять 10÷60с
і визначаються так саме, як і для термопар. Виключення становлять термометри,
призначені для вимірювання температури газу; для них показник теплової
інерційності визначається як постійна часу при зануренні термометра в потік
повітря, що має постійну швидкість 0,5 м/с.
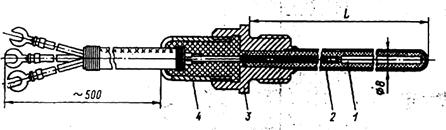
Рисунок 1.3 Конструкції
традиційних термодатчиків
Поверхневі термоперетворювачі відрізняє висока
надійність, малі розміри, матеріалоємність, поліпшені показники теплової
інерції. Термоопори стійкі до вібрації й зберігають працездатність при
вологості до 98 %. Не вимагають складних монтажних робіт при установці на
об'єкті. При установці на труби або радіатори дозволяють із низькою тепловою
інерцією виміряти температуру енергоносія. Практично незамінні для труб малого
діаметра, де установка середовищних перетворювачів ускладнена або економічно
недоцільна.
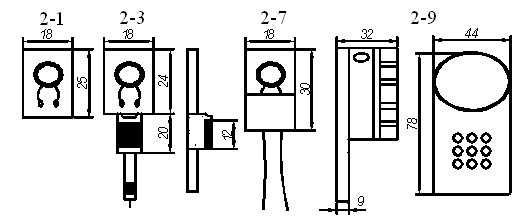
ЧЕ термоперетворювачів групи 2 виконані у вигляді плоскої одношарової
біфілярної спіралі, закріпленої між двома пластинами зі склотканини. Товщина
такого ЧЕ не перевищує 0,15мм. Виводи перетворювача 2-1 – плоскі у вигляді
пелюстків. Перетворювачі 2-3, 2-7 конструктивно виконані на базі моделі 2-1, деталі
повторюємо із закладенням виводів у корпусі із пресматеріала АГ-4У (2-3) або
високотемпературного клейового заливання (2-7). Термоперетворювачі 2-1, 2-3,
2-7 рекомендуються для вимірювання температури поверхонь обмоток, підшипників,
електродвигунів і генераторів, а також поверхонь труб будь-якого діаметра.
Термоперетворювач 2-9 призначений для виміру температури зовнішнього повітря й
температури в приміщеннях.
Поверхневі ТО найбільш використовуються в сучасних вимірювальних
перетворювачах і різних бортових вимірювальних системах як датчики температури
для визначення поточної температури бортового засобу вимірювання з метою
наступної алгоритмічної компенсації його систематичних додаткових температурних
похибок.
В Україні АТ «Чезара»
робить мідні й платинові середовищні й поверхневі ТО (таблиця 1, 2).
У таблиці 3 у скороченому об’ємі наведені параметри номінальних СГХ
мідних і платинових ТО. Зроблені
заводом-виробником ТО після їх статичного градуювання розподіляються на п'ять
класів точності. Критеріями розподілу є припустимі відхилення опору R0
при Т0=0˚З і чутливості S100=R100/R0,
обумовленої як відношення опорів при Т=100˚З і Т0=0˚С.
Величини припустимих відхилень наведені в табл. 4.
Таблиця 1 Основні технічні
характеристики поверхневих ТО виробництва АТ «Чезара»
| Технічна
характеристика |
Тип, марка ТЕ |
| Мідний ТОМ |
Платиновий ТОП |
| ТМ-221 |
ТМ-006
(ТМ-104)
|
ТМ-232 |
ТЭМ |
ТП-018 (025) |
ТП-033 |
| 1. Діапазон
вимірюваних температур, °З |
-50... …+200 |
-196... …+200 |
-130... …+200 |
-196... …+200 |
-260... …+300 |
-50... …+1000 |
|
2 Номінальний
опір R0 при Т0=0°С, Ом
|
53; 100; 200 |
53; 60; 100 |
53; 100 |
53; 60; 100 |
60; 100; 500 |
15; 25; 34 |
|
3. Тип
номінальної СГХ
за ГОСТ
6651-94
|
гр. 23; 100 М; 200 М |
гр. 23; 100 М |
гр. 23; 100 М |
гр. 23; 100 М |
50 П; 100 П;
500 П
|
15 П; 25 П;
35 П
|
| 4. Похибка
індивідуальної СГХ, не більше, °З |
0,5 |
0,5 |
1,5 |
0,5 |
0,5 |
|
| 5. Показник
теплової інерції, не більше, с |
0,5 |
0,01 |
0,01 |
0,01 |
0,01 |
0,01 |
| 6. Гарантійний
термін, років |
12 |
15 |
15 |
15 |
15 |
15 |
| 7. Габаритні
розміри, мм (маса, гр.) |
10 х
6
(1)
|
20 х
32
(2,5)
|
10 х
20
(1,5)
|
(0,5) |
(8) - ТП-018
(0,5) - ТП-025
|
49 х
23
(10)
|
| 8.
Конструктивні виконання, згідно малий..2. |
Тип 1
Підкладка-
ситал
|
Тип 1
Підкладка-
склотканина
|
Тип 1
Підкладка-
склотканина
|
Тип 1
Підкладка-
склотканина
|
Тип 1
ТП-018 пластм.
корпус
|
Тип 1 |
| 9. Особливості
застосування |
Для плоских
поверхонь |
ТМ-006 для
плоских поверхонь;
ТМ-104 для
поверхонь із R=7...100мм
|
Для поверхонь
із R≥10мм |
Для плоских
поверхонь |
Для плоских
поверхонь
ТП-018 у
пластмасовому корпусі
|
Для плоских
поверхонь |
|
|
|
|
|
|
|
|
Примітка: 1. СГХ - статична градуювальна характеристика;
Допуск на величину номінального опору R0 (по п. 2) не більше
±0,5 Ом.
Таблиця 2 Основні технічні
характеристики середових ТО виробництва АТ «Чезара»
| Технічна
характеристика |
Тип, марка ТО |
| Мідний ТОМ |
Платиновий |
ТОП |
| ТМ-168 |
ТМ-166 |
ТП-198
(ТП-227)
|
ТП-165
(ТП-175)
|
| 1. Діапазон
вимірюваних температур, °З |
-196... …+200 |
-196... …+200 |
-260... …+200 |
-260... …+300 |
|
2 Номінальний
опір R0 при Т0=0°С, Ом
|
100 |
100 |
100, 500 |
100 |
|
3. Тип номінальної
СГХ за
ДЕРЖСТАНДАРТ 6651-94
|
100 М |
100 М |
100 П, 500П |
100 П |
| 4. Похибка
індивідуальної СГХ, не більше, °С |
0,5 |
0,5 |
0,5
0,1 у
діапазоні -260...0С
|
0,5 |
| 5. Показник
теплової інерції, не більше, с |
5 |
5 |
3 (ТП-198)
0,5(ТП-227)
|
5 |
| 6. Гарантійний
рядків, років |
15 |
15 |
12 |
10 |
| 7. Габаритні
розміри, мм (маса , гр.) |
(20) |
(80) |
(74 - ТП-198)
(12 - ТП-227)
|
(80 - ТП-165)
(20 - ТП-175)
|
| 8. Особливості
застосування й конструкції |
Для
неагресивних рідин і газів. Кріплення- двома гвинтами. Негерметичний. |
Для
неагресивних рідин і газів під тиском до 200 кг/див2. Кріплення-
різьба М16-1. Герметичний.
|
Для криогенних
рідин. Герметичний. |
Для
неагресивних рідин і газів,
ТП-175
негерметичний.
ТП-165
герметичний при тиску до 200 кг/див2.
|
Таблиця 3
Параметри номінальних СГХ мідних і платинових ТО
| Тип термометра |
Номінальний
опір при 0°С, Ом |
Позначення
градуювальної характеристики |
Діапазон
температур,
°С
|
| ТОП |
1
5
10
(46)
50
100
500
|
1П
5П
10П
(гр. 21)
50П
100П
500П
|
-50...+1100
-100...+1100
-200... +1000
-260... +1000
-260...+ 1000
-260...+1000
-260...+300
|
| ТОМ |
10
50
(53)
100
|
10М
50М
(гр. 23)
100М
|
-50...+200
-50...+200
-50...+180
-200...+200
|
Таблиця 4
Припустимі відхилення номінальних СГХ мідних і платинових ТО
| Тип термометра |
Клас точності |
Параметр
термометра |
|
ΔR0/
R0, %
|
S100=1,3910
|
S100=1,4280
|
| +a |
-b |
+a |
-b |
|
|
|
|
|
|
|
| ТОП |
I |
II |
III |
|
| IV |
V |
±0.05 |
±0.1 |
|
| ±0.2 |
±0.4 |
±0.8 |
0,0015 |
0,0005 |
| 0,0010 |
0,0020 |
0,0030 |
|
|
| 0,0050 |
– |
ТОМ |
I |
II |
| III |
IV |
V |
– |
|
| ±0.1 |
±0.2 |
±0.5 |
|
|
| ±1.0 |
– |
– |
0,001 |
0,002 |
| 0,003 |
0,005 |
|
|
|
Будь які інші вимірювачі температури для того, щоб бути готовими до
широкого використання, повинні відповідати представленим характеристикам.
Зорієнтуємось на досягнення розробленим термодатчиком показників серійних
термометрів: діапазон вимірювання термодатчиків на пасивних ПАХ-елементах –50
…+200°С, похибка вимірювання 0,5%,
показник теплової інерційності 5 с, габаритні розміри 14´17 мм.
Вимірювальний ланцюг також матиме класичну схему (рис.5) ТО в складі
чутливого до температури первинного перетворювача (ПП) та вторинного
перетворювача (ВП) вихідної характеристики термодатчика до потрібного вигляду:
 Т [˚C] R(T) [Ом]
U(T) [В]
Т [˚C] R(T) [Ом]
U(T) [В]
Рисунок 1.4 Структурна схема термодатчика
ВП, як правило, є потенціометричним або мостовим вимірювальним ланцюгом
(ВЛ) постійного струму, що здійснює перетворення опору ТО R(T) у вихідну
електричну напругу постійного струму пропорційну вимірюваній температурі. Для
термодатчика на пасивних ПАХ елементах ВП є передавачем та приймачем
радіосигналу.
2. ПРИНЦИПИ ПОБУДОВИ ТЕРМОДАТЧИКІВ НА АКУСТИЧНИХ ХВИЛЯХ
2.1 Принципи побудови акустичних датчиків
Як джерело інформації у вимірювальних перетворювачах на пасивних
елементах використовується механічна, або акустична, хвиля. Коли хвиля
поширюється усередині матеріалу або по його поверхні, будь-які зміни
характеристик траєкторії поширення хвилі впливають на швидкість й/або амплітуду
хвилі. Частота й фазові характеристики показують зміну швидкості хвилі.
Практично всі акустичні прилади й датчики для генерування хвилі
використають п'єзоелектричні матеріали. П'єзоелектрика була відкрита братами
(Пьером і Полем-Жаком Кюрі Pierre й Paul-Jacques Curie) в 1880 р., а назви
одержало в 1881 р. від Вільгельма Хенкела (Wilhelm Hankel). П'єзоелектрикою
називають електричний заряд, що з'явився в результаті механічної напруги.
Твердження вірно й у зворотну сторону. Застосування підходящого електричного
поля до п'єзоелектричного матеріалу створює механічна напруга. П'єзоелектричні
акустичні сенсори створюють механічні хвилі за допомогою електричного поля. Ці
хвилі поширюються в підкладці, а потім, для проведення необхідних вимірів,
трансформуються назад в електричне поле.
Поверхневі пружні хвилі зустрічаються в природі часто. З ними зв'язано, наприклад,
поширення коливань земної кори (землетрусів) або збурюванні на поверхні води. У
цих випадках довжина хвилі являє собою величину від сотень метрів до декількох
сантиметрів. Поверхневі пружні хвилі вивчав ще у вісімдесятих роках минулого
століття Релей у зв'язку із проблемою визначення епіцентру землетрусів. Він
створив теоретичну основу для рішення завдань, пов'язаних з поверхневими
пружними хвилями.
Поверхневі пружні хвилі займають істотно менший діапазон, чим зазначено
вище: вони укладені в області 10-5—10-1см. Такі хвилі
відомі як поверхневі акустичні хвилі (ПАХ), хоча їхні частоти відповідають
області ультразвуку.
Для порушення й реєстрації ПАХ застосовують п’єзоелектрики, значення яких
у зв'язку із цим істотно зросло. Поверхневі акустичні хвилі володіють рядом
чудових властивостей, що представляють інтерес для фахівців в області
електроніки. Насамперед це (у порівнянні з об'ємними хвилями) їхня доступність
і можливість управляти ними у всіх крапках поверхні, де вони існують.
Поверхневі акустичні хвилі поширюються зі швидкістю на п'ять порядків нижче,
ніж швидкість електромагнітних хвиль, що дозволяє використати методи,
застосовувані в діапазоні НВЧ.
Звичайний акустичний пристрій (рис.2.1) складається із двох
зустрічно-штирових перетворювачів. Один з них перетворить енергію електричного
поля в механічну хвилю, інший проводить зворотне перетворення.
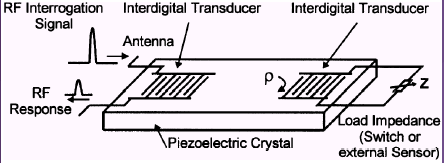
Рисунок. 2.1 Акустичний пристрій
Акустичні пристрої описуються способом поширення хвиль: через або по
поверхні п'єзоелектричної підкладки. В основному акустичні хвилі розрізняються
по швидкості й напрямками переміщення часток. Залежно від матеріалу й граничних
умов можуть бути різні варіанти. Перетворювач кожного датчика створює
електричне поле, необхідне для деформації підкладки й, відповідно, формування
акустичної хвилі. Хвиля поширюється через підкладку, у якій перетвориться назад
в електричне поле й повертається на інший кінець перетворювача. На рис. 2.2
зображено схему типового акустичного пристрою. Переміщення часток поперечних,
або зсувних, в хвилі відбувається по нормалі відносно напрямку поширення хвилі.
Воно може бути поляризовано таким чином, щоб бути паралельним або
перпендикулярним відносно чутливої поверхні. Рух зсувної горизонтальної хвилі
позначає поперечні переміщення паралельно чутливій поверхні; рух зсувної
вертикальної хвилі - перпендикулярно їй.
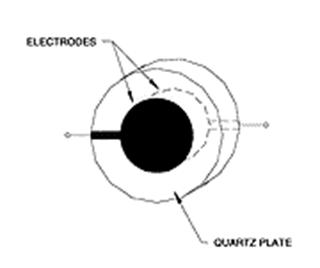
Рисунок 2.2 Акустичний пристрій на ОАХ
Хоча цей пристрій був створений досить давно, вимірювання швидкості
осадження металу все ще здійснюється за допомогою резонатора товщини сдвиговой
хвилі.
Хвиля, що проходить через підкладку, називається об'ємною хвилею.
Найпоширенішими пристроями на об'ємній акустичній хвилі (ОАХ) є п'єзоелектричні
резонатори з коливаннями зсуву по товщині (КЗТ) і датчики горизонтально
поляризованих акустичних плоских хвиль (АПВ).
Якщо хвиля поширюється на поверхні підкладки, тоді вона називається
поверхневою хвилею. Найбільше широко використовувані пристрої на поверхневих
хвилях - це датчик поверхневих акустичних хвиль (ПАХ) і датчик горизонтально
поляризованих поперечних поверхневих хвиль, також відомий як датчик поверхневої
зсувної хвилі (ПЗХ).
Всі пристрої на акустичних хвилях датчиками чутливі до відхилень багатьох
фізичних параметрів. Будь-яка зміна в характеристики шляху поширення акустичної
хвилі змінить відповідно й результат на виході. Всі датчики будуть працювати в
газовому або вакуумному середовищі, але тільки їхня сукупність буде ефективно
працювати при контакті з рідинами. Датчики на ПАХ та ОАХ - генерують хвилі, які
поширюються в основному в поперечно-горизонтальному напрямку. Поперечна
горизонтальна хвиля не випромінює енергію в рідинах, і це дозволяє працювати з
рідинами без надмірного загасання. З іншого боку, у датчика ПАХ існує істотний
зсув поверхневої нормалі, що приводить до випромінювання хвиль стиску в рідині,
і це викликає надмірне загасання. Виключення із цього правила становлять
пристрої, що використають хвилі, які поширюються на меншій швидкості, чим
швидкість звуку в рідині. У незалежності від компонентів зсуву, такі типи хвиль
не поширюються когерентно й у такий спосіб вони відносно не демпфіруються
рідинами.
Цікавими для датчиків можуть бути також інші акустичні хвилі, такі як:
плоска згінна хвиля, хвиля Лява, приповерхня акустична хвиля й хвиля Лемба.
Перед тим, як звернутися до прикладів їхнього застосування, корисно буде
коротко розглянути кожний з типів датчиків.
У датчику горизонтально поляризованих акустичних плоских хвиль (рис.2.3),
хвиля поширюється між верхньою й нижньою поверхнею пластини, що дозволяє
проводити вимір на обох сторонах.
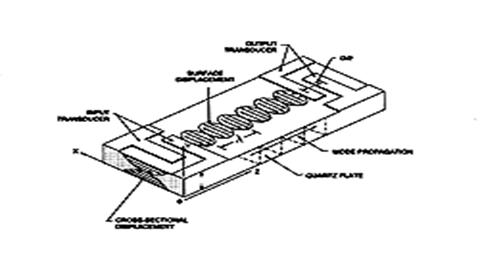
Рисунок 2.3 Датчики на поверхневих хвилях
Резонатор коливання зсуву по товщині, часто називаний кварцовими
мікровагами, є найбільш відомим, давно винайденим і простим пристроєм на
акустичних хвилях. Як показано на рисунку 6, він звичайно складається з товстої
пластини п’єзокварцу Ат-зрізу з
паралельними круговими електродами, нанесеними на обидві сторони. Результатом
додаткової напруги між цими електродами стає зсувна деформація п’єзокристалу.
Це пристрій відомо як резонатор, тому що п’єзокристал резонує, коли
утворяться електромеханічні стоячі хвилі. Зсув досягає граничних значень на
грані кристала, що робить пристрій чутливим до поверхневої взаємодії. Довго
такий резонатор використався для виміру рівня металізації у вакуумних системах,
де він звичайно використався в генераторних схемах. Частота коливань відповідає
резонансу кристала й визначає нагромадження маси на поверхні приладу.
Наприкінці 1960-х було продемонстровано, як ОАХ- резонатор працює в якості
датчик випару.
ОАХ резонатор характеризується простотою виробництва, здатністю
витримувати суворі умови навколишнього середовища, температуростійкістю й
гарною чутливістю до додаткових мас, напиленим на поверхню пьезокристаллу.
Через компонент поширення поперечних хвиль TSM резонатор також може виявляти й
вимірювати рідини, що робить його гарним кандидатом у біодатчики. На жаль, ці
пристрої мають найнижчу чутливість маси серед всіх датчиків, розглянутих тут.
Стандартний ОАХ резонатор працює в межах 5-50 Мгц. Створення дуже тонких
пристроїв, що працюють на більше високих частотах може збільшити чутливість
маси, але тоншання датчиків нижче стандартних значень приводить до створення
неміцних пристроїв, які складно робити й експлуатувати. Останнім часом були
пророблені робота зі створення високочастотних ОАХ - резонаторів з
використанням п'єзоелектричної плівки й техніки об'ємної мікрообробки кремнію.
Хвилі Релея (рис. 2.4) рухаються вертикально відносно грані поверхні
датчика поверхово-акустичних хвиль (ПАХ). ПАХ-хвилі дуже чутливі до змін
поверхні, однак не дуже придатні для більшості приладів виміру/визначення
рідини.
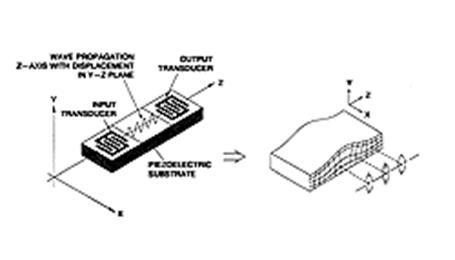
Рисунок 2.4 Хвилі Релея
Датчики горизонтально поляризованих поперечних поверхневих хвиль
використають тонку п'єзоелектричну підкладку, або пластину, що працює як
акустичний хвилевід, що втримує енергію між верхньою і нижньою поверхнями
пластини (рис. 2.4). У результаті, обидві поверхні піддаються зсуву, так що
вловлювання може виникнути на будь-якій стороні. Це важлива перевага, тому що
одна сторона містить зустрічно-штировий перетворювач, якому необхідно ізолювати
від електропровідної рідини або газів, у той час як друга сторона може бути
використаний як датчик.
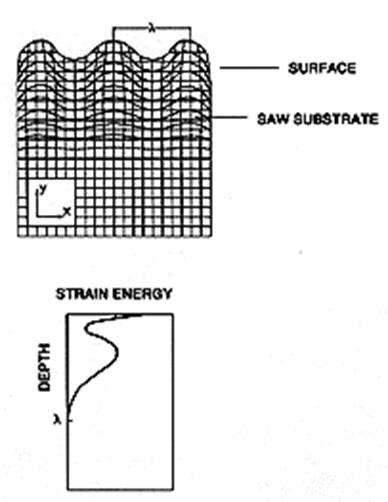
Рисунок 2.5
Поверхневі хвилі
Енергія поверхневої хвилі замикається в межах однієї довжини хвилі з
поверхні (Рис. 2.5) датчика на ПАХ. Ця характеристика дозволяє створювати
датчики, дуже чутливі до взаємодії з поверхнею.
Так само як й ОАХ резонатор, відсутність компонента нормалі до поверхні
дозволяє датчику вступати в контакт із рідиною й застосовувати його як
біодатчик. Датчики на ОАХ в минулому успішно використані для виявлення ртуті в
кількості мікрограм на літр, що відповідає рівню відповідного тесту відповідно
до Закону про безпечну питну воду. Більше чутливі до навантаження маси від
власної ваги чим TSM резонатор, SH-APM менш чутливі чим датчики поверхневої
хвилі. На це є дві причини: перша полягає в тім, що чутливість до навантаження
маси від власної ваги й інших відхилень залежить від товщини пластини, причому
чутливість зростає разом з тоншанням пристрою. Межі товщини визначаються
виробничим процесом. Друга причина полягає в тому, що енергія хвилі не досягає
граничних значень на поверхні, що зменшує чутливість.
Конструктивно п’єзорезонатори з коливаннями зсуву по товщині виконуються
у вигляді тонких плоскопаралельних пластин (круглих або прямокутних) з
відношенням довжини (діаметра) до товщини не менш 50 (рис. 2.6, а).
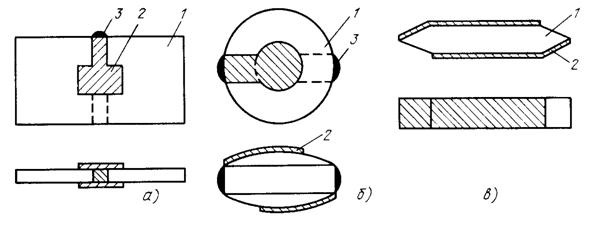
Рисунок 2.6 П’єзорезонатори з коливаннями зсуву по товщині: 1 - п’єзоелемент;
2 - електрод; 3 – токопідвід
Або у вигляді плосковипуклих або двояко-випуклих лінз із відношенням
діаметра до товщини не менш 5—10 (рис. 2.6, б). У резонаторах двох зазначених
типів електроди збурення розміщаються в центрі поверхонь п’єзоелементів. У
третьому варіанті, використаному порівняно рідко, ПР виконується у вигляді
тонкого оконтуреного стрижня, частково або повністю вкритого електродами (рис. 2.6,в).
У перерахованих конструкціях електроди формуються безпосередньо на
поверхні п’єзоелементу.
Підвищення робочої частоти вимагає зменшення частотозадаючого розміру п’єзовібратора.
У товщинно-зсувних резонаторах це — товщина. На частотах понад 50 МГц вона стає
менше 30 мкм, що створює труднощі виготовлення й експлуатації через низьку
міцність п’єзоелементів. Проблема одержання високочастотних п’єзоелементів
вирішується шляхом виконання резонаторів у вигляді тонких перемичок п’єзоелементу.
У цьому випадку міцність конструкції створюється великою міцністю периферії.
Тонка центральна частина виконується методами іонного або хімічного травлення.
У ПРД найчастіше застосовуються п’єзорезонатори повернених У-зрізів, що дає коливання зсуву по товщині.
Частота коливань цих п’єзорезонаторів у першому наближенні визначається співвідношенням:
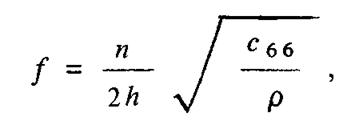
де с66 - діюча константа пружності, визначена як
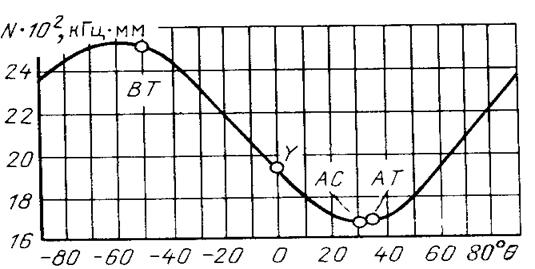
Рисунок 2.7. Залежність частотної постійної N від кута 0 для резонаторів
повернених У-зрізів
Коливання зсуву по товщині

де в — кут повороту пластини навколо осі X, відкладений від площини XZ для
чистого У-зрізу 0 = О град.
У кварцових п’єзорезонаторах з коливаннями зсуву по товщині присутній
ефект локалізації енергії , тобто коли коливальна енергія концентрується в
центральної піделектродній області п’єзоелементу. Безелектродні периферійні
області ПР виявляються практично вільними від пружних коливань, що дозволяє
здійснювати кріплення п’єзовібратора на значній площі поблизу його країв без
помітного погіршення добротності. Цей ефект, надзвичайно важливий у практичному
відношенні, прийнято називати ефектом локалізації енергії. В останні
десятиліття ефект локалізації був всебічно досліджений, що послужило поштовхом
до створення високочастотних ПР із моночастотним спектром і монолітними
п'єзоелектричними фільтрами.
На основі п’єзорезонаторів з локалізацією енергії в цей час будується
більшість п’єзорезонансних датчиків. Основні причини широкого застосування ПР
із локалізацією енергії у вимірювальних перетворювачах полягають у наступному.
1. У порівнянні із системами кріплення резонаторів інших типів система
кріплення п’єзорезонаторів з локалізацією енергії в істотно меншому ступені
впливає на властивості резонатора як коливальної системи і його характеристики
як перетворювачі параметра в частоту. Останнє ставиться до
термопреобразователям і пристроїв мікрозважування на основі мас-чутливих
резонаторів.
2. Використання резонаторів з локалізацією енергії в датчиках механічних
величин дозволяє найбільш просто приєднувати тензочутливі резонатори в
конструкцію без погіршення добротності ПР. Інші конструктивні рішення, що
забезпечують акустичну розв'язку вібратора, або значно складніші, або менш
ефективні.
3. П’єзорезонатори з максимальною добротністю (до 10-6)
реалізовані на кварцових лінзах, що працюють із використанням ефекту
локалізації. Більша добротність п’єзорезонатору — ключ до побудови
автогенераторів з високою короткочасною стабільністю частоти (до 10-12)
і реалізації датчиків з високою чутливістю.
4. П’єзорезонатори з локалізацією
зсувно-товщинних коливань-високочастотні. Як наслідок цього, абсолютні зміни
частоти у функції вимірюваного параметра для них звичайно вище, ніж у
резонаторів інших типів. Істотне значення мають малі габаритні розміри
високочастотних резонаторів. Це визначає можливість мікромініатюризації ПРД і
поліпшення їхніх динамічних характеристик.
Ефект локалізації енергії породжується особливостями поширення хвиль
зсуву в тонких п’єзопластинах. Як згадувалося вище, у
нескінченно пружному середовищі характер поширення хвиль визначається тільки
властивостями матеріалу. Хвильовий процес в обмеженому тілі визначається не
тільки властивостями середовища, але й характером взаємодії пружної хвилі із
границями пружного тіла — хвилеводу. Специфіка хвильового поширення зсувних
хвиль — їхня частотна дисперсія, що полягає в залежності постійній поширення 7
від частоти коливання з. Частотна дисперсія характерна для багатьох типів
акустичних коливань .
Особливість дисперсійних хвиль зсуву в пластинах полягає в тім, що при
деякій критичній частоті сокр постійна поширення хвилі стає
удаваною, у результаті чого характер поширення якісно міняється. Якщо рівняння
для хвилі, що поширюється, представити у вигляді

де А0 — амплітуда коливань у крапці розташування джерела; t— час;
z— відстань від джерела, те мнимої постійної поширення 7 = 'V 0 =
V^-l) буде відповідати хвиля, експоненциально спадаюча в міру видалення від
джерела:

Необхідно особливо підкреслити, що спад амплітуди коливань не зв'язаний у
цьому випадку з розсіюванням енергії, оскільки, як неважко показати, потік
енергії від джерела через перетин, нормальне z, виявляється рівним нулю.
Принципово хвилі зсуву можна збудити п’єзоелектрично,
підводячи напругу до електродів, що повністю покривають вібратор-пластину із
двох сторін. Однак у цьому випадку умови поширення зсувної хвилі будуть у всіх
крапках п’єзоелемента ідентичні й, таким чином, при частотах вище частоти
відсічення сокр хвиля буде вільно поширюватися по всьому п’єзоелементу,
а на частотах нижче частоти відсічення хвиля поширюватися не зможе в жодній з
областей. Це фактично означає, що п'єзоелектричне порушення хвильового процесу
на частотах f < fокр у розглянутому випадку фізично
нереалізовано. (Попутно відзначимо, що введення електродів збільшує момент
інерції п’єзоелементу й зсуває частоту відсічення fокр униз у
порівнянні із частотою відсічення вільної пластини.) З розглянутого приклада
ясно, що для локалізації енергії в одній з областей п’єзоелемента необхідно створити у
вібраторі неоднорідність. Найбільше просто це досягається, якщо електроди
порушення покривають тільки частина п’єзоелемента.
У цьому випадку центральна, піделектродна область вібратора характеризується
частотою відсічення сое меншої, чим частота відсічення вільної
пластини сос. Якщо тепер збуджувати елемент на частоті з', для якої
сое < з' < < сос, те, як неважко переконатися,
для піделектродної області постійна поширення 7Е буде дійсна й хвилі
зсуву в цій області будуть поширюватися вільно. У той же час постійна поширення
у вільній пластині 7С виявляється мнимої й хвилі зсуву в ній
поширюватися не зможуть. Відповідно до (1.23) амплітуда А буде експоненційно
спадати в міру видалення від краю електрода на периферію. Таким чином, при
частоті порушення, що задовольняє умові fое < f < fос>
енергія механічних коливань зсуву буде локалізуватися в піделектродної області,
не поширюючись на периферію п’єзоелемента. На частотах f > fос
постійна поширення виявляється дійсно. у всьому вібраторі, так що енергія
коливань вільно витікає з піделектродній області на периферію. У той же час на
частотах f < fое постійна поширення мнима у всіх областях п’єзоелемента, і, як ми вже відзначали,
на цих частотах п'єзоелектричне порушення нереалізоване. Таким чином, умови
локалізації зсувних коливань по товщині реалізуються тільки в області частот fое
< f < fос-
Розглянемо тепер питання про резонанс п’єзотока в структурі. Резонансна частота змінюється обернено пропорційно
товщині п’єзоелмента. З елементарних фізичних
міркувань ясно, що складена система, у якій товщина вібратора варіюється в
межах від hn у вільній частині до hn + h3 в
області електродів, повинна мати частоту механічного резонансу, що відповідає
деякому проміжному значенню товщини hp:
hn < hp < hn + h3.
Звідси виходить, що механічний резонанс системи пластина-електроди
повинен досягатися на частоті, що лежить у проміжку між частотами відсічення. Оскільки
для цього проміжку реалізуються умови локалізації й енергія коливань
зосереджена під електродами, на цій частоті коливань буде спостерігатися
резонанс п’єзотоку.
Спектральні характеристики ПР із локалізацією енергії в сильному ступені залежать
від параметрів електродних покриттів: збільшення площі й маси електродів
приводить до появи додаткових резонансів у спектрі п’єзотоку в безпосередній
близькості від частоти основного резонансу. Ці паразитні резонанси звичайно
називають ангармонічними обертонами. (Визначенням ангармонічні підкреслюється
той факт, що на відміну від обертонів гармонійній, кратних основній частоті,
ангармонические обертони умові /„ = nft не задовольняють.)
Зменшуючи товщину й поперечні розміри електродів, можна домогтися
локалізації єдиного резонансу, придушивши інші ангармонічні обертони, тобто
забезпечивши моночастотний спектр ПР. Співвідношення, що забезпечує виконання цієї вимоги,
знайдено з теоретичного аналізу спектра коливань пластин й одержало назву критерію
моночастотности. Критерій моночастотности записується як
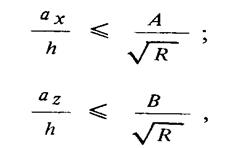
де ах і az — розміри електрода відповідно уздовж довжини й
ширини пластини; А и В — постійні (для кварцового У-зрізу відповідно А = 2,8; В
= 2,17); R - так званий коефіцієнт зниження, що характеризує відносну різницю
частот вільної й електродної областей вібратора:

Тут p‘ і p - щільності відповідно кварцу й електрода, а h і h' - товщини
відповідно вібратора й електрода, нанесеного з однієї сторони пластини.
Звичайне зниження R становить не більше 0,01-0,03. Величина R визначає
швидкість спаду амплітуди коливань А в міру видалення від краю електрода.
Практично, якщо п’єзоелемент кріпиться по периферії на відстані 10-15 h від
краю електрода, добротність коливань ПР може бути збережена на рівні 50-100
тисяч.
У порівнянні із плоскими більше ефективна локалізація енергії в центрі
п’єзоелементу досягається в лінзових ПР. У цих резонаторах навіть при
відсутності електродів центральна область має більш низьку частоту відсічення,
оскільки товщина в центрі за рахунок сферичності перевищує товщину вібратора на
периферії. Різниця частот відсічення в центрі й на периферії становить у лінзах
не 1—3%, як у резонаторах-пластинах, а істотно більше: у принципі, товщина лінзи
на краю може бути зведена до нуля. Тому в лінзових резонаторах вдається більш
якісно розв'язати край п’єзоелементу від коливань, забезпечивши цим одержання
добротностей на рівні 106 — 107. Відповідно до теорії для
кварцу граничні значення добротності самого матеріалу залежать від частоти й
визначаються співвідношенням

Добротність кращих лінзових резонаторів близька до теоретичної межі.
2.2 Аналіз можливих варіантів побудови датчиків акустичних хвиль
В 1887 році лорд Релей відкрив режим поверхневої акустичної хвилі й у
своїй класичній роботі пророчив властивості цих хвиль. Названі по імені людини
їх що відкрили, хвилі Релея володіють поздовжнім і вертикальним поперечним
компонентом, що може з'єднуватися із середовищем при контакті з поверхнею
пристрою. Таке з'єднання сильно впливає на амплітуду й швидкість хвилі. Ця риса
дозволяє датчикам ПАХ прямо оцінювати масу й механічні характеристики. Рух
поверхні також дозволяє використати ці пристрої як мікроприводи. Хвиля має
швидкість приблизно на 5 порядків менше ніж відповідна електромагнітна хвиля,
що робить поверхневі хвилі Релея одними із самих повільних по швидкості
поширення у твердих речовинах. Амплітуда хвилі становить ~10 Aнг, а довжина
хвилі коливається від 1 до 100 мікронів.
На рис. 2.4 докладно представлено область деформації, викликана
поширенням ПАХ уздовж осі Z і відповідний розподіл потенційної енергії. Тому що
фактично вся енергія хвиль Релея укладена в межах однієї довжини хвилі на
поверхні, датчики ПАХ мають найбільшу чутливість серед всіх розглянутих
акустичних датчиків.
Зазвичай датчики ПАХ працюють у межах від 25 до 500 Мгц (рис.2.8). Одним
з недоліків цього пристрою є те, що хвилі Релея є поверхневими нормальними
хвилями, і тому вони погано підходять для виміру рідин. Коли датчик ПАХ вступає
в контакт із рідиною, в результаті хвилі стиску викликають істотне загасання
поверхневої хвилі.

Рисунок 2.8 Приклади датчиків на ПАХ
Датчики акустичної хвилі комерційно доступні в декількох формфакторах.
Більшість із них являє собою напівпровідникові пластини, які потім тестуються, нарізуються
на кристали й упаковуються.
Якщо зріз п’єзокристала відповідним чином повернути, тоді мода хвилі
міняється від датчика з вертикально-поперечною ПАХ до датчика на
поперечно-горизонтальної ПАХ. Це істотно знижує втрати, коли рідини вступають у
контакт із середовищем поширення, що дозволяє датчикам ПАХ працювати в якості
біосенсорів.
У загальному випадку, чутливість датчика пропорційна кількості енергії,
що виникає на шляху поширення хвилі. Датчики об'ємної акустичної хвилі
розсіюють енергію з поверхні через речовину основи на іншу поверхню. Розподіл
енергії мінімізує інтенсивність енергії на поверхні, на якій відбувається
вимір. Датчики ПАХ навпаки фокусують енергію на поверхні, що робить їх більше
чутливими. Інші конструкторські міркування при виборі датчиків акустичних хвиль
містять у собі стабільність генератора й рівень перешкод.
3. ЗАСТОСУВАННЯ ДАТЧИКІВ НА АКУСТИЧНИХ ХВИЛЯХ
Всі датчики акустичних хвиль
у тім або іншому ступені чутливі до відхилень від багатьох фізичних параметрів.
Якесь із представлених на ринку датчиків представлені на фото 1. По суті
говорячи, всі датчики акустичних хвиль, що випускають для індустрії
телекомунікацій повинні бути герметично запечатані для запобігання будь-яких
перешкод, які можуть бути обмірювані пристроєм і відповідно викличуть небажані
зміни на виході.
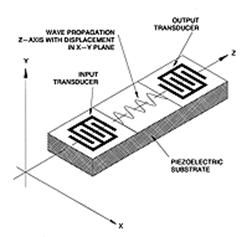
Рисунок 3.1 Лінія затримки
Якщо вибрати правильний напрямок зрізу матеріалу, тоді будуть переважати
горизонтально поляризовані поперечні поверхневі акустичне хвилі (рис.3.1). У
цих хвиль є зсув, паралельний поверхні пристрою.
Рівень фактору, що можуть уловити акустичні пристрої, може бути значно
збільшений шляхом нанесення на пристрій покриття з матеріалів, які
перетерплюють зміни в масі, пружності, або провідності під впливом яких-небудь
фізичних або хімічних стимулів. Під прикладеною напругою, що міняє динамічні
властивості середовища, ці датчики стають детекторами тиску, що обертає
моменту, ударної хвилі й сили. Вони стають датчиками маси, або ваги, якщо
часткам дозволено контактувати із середовищем поширення, міняючи напруги в ній.
Вони стають датчиками випару коли застосовується покриття, що абсорбує тільки
певні хімічні осадження. Ці пристрої працюють шляхом ефективного виміру маси
абсорбованого осадження. Якщо покриття абсорбує певні біологічні хімічні
речовини в рідинах, датчик стає біодатчиком. Як було замічено раніше, якщо
вибрати правильний напрямок поширення хвилі, можна створити бездротової датчик
температури. Середовище поширення міняється разом з температурою, впливаючи на
дані на виході. Нижче наведені деякі найбільш загальні способи застосування
датчиків акустичних хвиль.
Термодатчик будується на термозалежності швидкості поверхневих хвиль, яка
визначається напрямком і типом кристалічного матеріалу, використовуваного для
виробництва датчика. Термодатчики на базі генераторів лінії запізнювання ПАХ
володіють міліградусною роздільною здатністю, гарною лінійністю й низькою
інерцією. Вони до того ж досить чутливі до навантаження маси від власної ваги й
тому повинні бути герметично упаковані. 124 Мгц термодатчик кварцу ST-зрізу
приповерхньої об'ємної хвилі, як недавно стало відомо, має температурний
коефіцієнт 32 ppm/ C і чутливість 0.22 C. Він також продемонстрував на три порядки меншу чутливість до навантаження маси від власної ваги, чим датчик на
ПАХ. Час відповіді становить 0.3 с, що в 103 рази швидше ніж датчик ПАХ.
Перевага термодатчиков також полягає в тому, що вони не вимагають елементів і
вони є бездротовими, що робить їх придатними для використання у віддалених
місцях.
Датчики тиску стали першою заявленою технологією використання ПАХ у сфері
застосування датчиків, у 1975 році . На швидкості ПАХ сильно впливає напруга,
що подається на п'єзоелектричну підкладку, по якій поширюється хвиля. У такий
спосіб датчик тиску на ПАХ створений шляхом перетворення пристрою в діафрагму
(див. рис. 3.2).
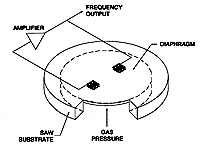
Рисунок 3.2
Датчик тиску на ПАХ
Частоти ПАХ змінюється разом з напругою. Коли діафрагма прогинається під
тиском, датчик ПАХ змінює дані на виході.
Невідшкодовані температурні коливання, які заважають роботі датчиків
тиску на ПАХ може бути мінімізований шляхом приміщення зразкового пристрою
виміру на ПАХ поруч із що вимірює ПАХ на ту ж підкладку й змішуючи два сигнали.
Один датчик працює як термодатчик, чия близькість до датчика тиску гарантує, що
обоє з них піддані однієї й тій же температурі. Однак температурний датчик на
ПАХ повинен бути ізольований від напруги, якому піддається ПАХ.
Датчики тиску на ПАХ пасивні (не вимагають елементів живлення),
бездротові, дешеві, витривалі, дуже компактні й легені, і відповідно добре
пристосовані для виміру тиску в об'єктах, що рухаються (наприклад, шини машин
або вантажівок). Ці характеристики забезпечують перевага над такими технологіями
як ємнісні й п’єзорезистивні датчики, яким
необхідні елементи живлення і які не є бездротовими. Датчик тиску на ПАХ вагою
<1м з дозволом 0.73 фунт на квадратний дюйм недавно був інтегрований у шину
автомашини з відмінними результатами. Така система дозволяє операторові
спостерігати тиск у кожній із шин з комфортної кабіни. Правильно надуті шини
сприяють поліпшенню безпеки, більшої ощадливості палива й до більше довгого
строку експлуатації самих шин. Ця технологія особливо цікава для нового ринку
шин зі спущеним тиском (також називаних з нульовим тиском або розширеною
маневреністю).
Датчик крутного моменту на пристрої з ПАХ, нерухомо прикріпленого до
плоского місця на валу, й вал піддається крутному моменту, цей крутний момент
піддає напрузі датчик і перетворює його в бездротової, пасивний, легкий датчик
крутного моменту. Якщо вал обертається в одну сторону, тоді датчик перебуває в
стані натягу, при обертанні в іншому напрямку датчик перебуває в стані стиску.
У практичному застосуванні два датчики обертаючого моменту використаються таким
чином, що їх центральні (осьові) лінії перебувають під прямим кутом один до
одного. Таким чином, коли один датчик перебуває в стані стиску, інший - у стані
натягу. Тому що обидва датчики піддаються одній температурі, сума двох сигналів
мінімізує будь-які ефекти виходу параметрів під впливом температури.
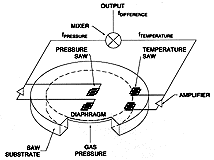
Рисунок 3.3
Диференціальний датчик тиску на ПАХ
Додавання другого ПАХ ефективно мінімізує температурні коливання датчика
тиску на ПАХ.
У порівнянні з іншими датчиками крутного моменту, включаючи резистивні
датчики опору, оптичні перетворювачі, торсони, датчик крутного моменту на ПАХ є
дешевим, має високу надійність і до того ж бездротової. Відстеження крутного
моменту на вантажівках й автомашинах значно поліпшить керування й гальмування,
тому що крутний момент вимірює зчеплення коліс набагато краще, ніж датчики
обертів двигуна, використовувані в цей час.
Датчики маси. Із всіх оцінюваних тут пристроїв, датчики на ПАХ найбільш
чутливі до навантаження від власної маси, що можна використати при створенні
датчика часток і датчика товщини плівки. Якщо датчик покритий адгезивом, то він
стає датчиком часток: будь-яка частка, що попадає на поверхню там і залишається
й змінює поширення хвилі. Повідомляється, що дозвіл по масі становить 3 pg на
200 Мгц кварцу ST-зрізу ПАХ, що в 1000 3 чувствительней протестированного 10
Мгц TSM резонатора. Датчики часток використаються у виробничих приміщеннях,
моніторах якості повітря, і моніторах атмосфери.
Датчик товщини працює в основному по тім же принципі що й датчик часток,
за винятком того, що на ньому немає покриття. Вимірюване зрушення частоти
пропорційне масі обложеної плівки, так що датчик одержує дані по товщині шляхом
виміру щільності плівки й акустичного опору. Цей метод точний тільки в тому
випадку, якщо плівка тонка (в ідеальному випадку не більше чим кілька відсотків
акустичної довжини хвилі). Найбільш доступні в продажі датчики товщини
базуються на TSM резонаторах. Не будучи такі ж чутливими, як датчики на ПАХ, ці
пристрої проте легкі у використанні й мають достатню чутливість.
Датчик конденсації/вологості. Якщо датчик на ПАХ піддається
температурному контролю й прямому впливу навколишнього середовища, то вода буде
конденсуватися на ньому при температурі конденсації, що робить його ефективним
датчиком крапки конденсації. Існуючі комерційні інструменти для високоточних
вимірів крапки конденсації засновані на оптичних методах, які є досить
дорогими, і не мають достатню чутливість, точністю й довгостроковою стійкістю.
Був розроблений 50 МГц датчик конденсації YZ-зрізу ниобата літію на ПАХ, що
стійкий до основних забруднюючих речовин, має дозвіл ±0.025°C (порівн. ±0.2°C для оптичного датчика), дешевий, і значно більше стабільний.
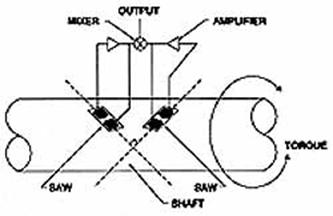
Рисунок 3.4 Датчик обертання
Напруга у валу передається на датчик на ПАХ, що через напругу міняє свою
робочу частоту й, відповідно, що крутить момент. Додаткове використання ще
однієї ПАХ мінімізує температурний ефект.
З датчиків акустичних хвиль із пружним гігроскопічним полімерним
покриттям виходять відмінні датчики вологості. Три складові механізму
становлять чутливість датчика: навантаження від власної маси, електроакустичні
ефекти й в‘язкоеластичні ефекти. Кожний із цих механізмів можна ефективно
контролювати й робити дешевий, точний датчик вологості. 50 Мгц датчик YZ-зрізу
ниобата літію на ПАХ, покритий polyXIO був продемонстрований як датчик
вологості з діапазоном відносної вологості 0%-100% й областю неоднозначності
порядку 5%. Додатково, 767 Мгц датчик AT-зрізу кварцу на SH-ПАХ був недавно
продемонстрований як датчик вологості із чутливістю 1.4 ppm/% відносної
вологості й областю неоднозначністю в 5%. Як з'ясувалося, він є більше чутливим
пристроєм, чим 14 Мгц TSM резонатор, покритий тим же полімером.
У тій же категорії 434 Мгц датчик YZ-зрізу ниобата літію на ПАХ був
використаний як вилучений датчик води, а 86 Мгц датчик XY-зріз кварцу на хвилях
Лаві був продемонстрований як датчик льоду.
Хімічний датчик випарів із покриттям і без покриття. Уперше про датчик
хімічних випарів було заявлено в 1979 році. Більшість із них ґрунтується на
чутливості мас-детектора, у взаємодії з хімічно вибірним покриттям, що абсорбує
задані випари, що приводить до збільшення навантаження від власної ваги
пристрою. Як й у випадку з термокомпенсувальними датчиками тиску, одна з ПАХ
використається як крапка відліку, ефективно мінімізуючи ефект коливань
температури.

Рисунок 3.5
ПАХ аналізатор
Комерційно доступний портативний ПАХ аналізатор (рис. 3.5), що розпізнає
хімічні випари складається з 4 датчиків на ПАХ, на кожний з яких нанесене різне
полімерне покриття.
При виборі хімічно сорбціонного покриття необхідно приймати в розрахунок деякі
особливості будови пристрою. В ідеальному випадку, покриття повинне бути
повністю двостороннім, що означає, що воно буде абсорбувати, а потім повністю
десорбирувати випару при прочищенні свіжим повітрям. Швидкість, при якій
покриття абсорбує й десорбирує, повинна бути досить великим, наприклад.
Покриття повинне бути досить міцним, щоб витримувати корозійні випари. Воно
повинне бути селективні, абсорбуючі тільки певні випари й не усмоктуючи інших.
Покриття повинне працювати при розумних температурах. Воно повинне бути
стійким, відтвореним, чутливим, І нарешті, дуже важлива його товщина й
однорідність.
Коли кілька датчиків на ПАХ, кожний з унікальним хімічним специфічним
покриттям розміщені в певному порядку, тоді кожний з них буде давати різний
результат при впливі даного випару. Програмні засоби по розпізнаванню структур
допускають різноманітний список легкопаруючих органічних сполук, які можуть
бути виявлені й ідентифіковані, що утворить дуже потужний хімічний аналізатор.
Комерційно доступний аналізатор з поруч із 4 датчиками на ПАХ показаний на рис.3.5.
TSM резонатори успішно були використані для виміру хімічних випарів, але
вони значно менш чутливі чим їх ПАХ аналоги. Також ПАХ датчики хімічних випарів
були зроблені без покриттів. У цей методі використається колонка газового
хроматографа для відділення елементів хімічних випарів і термоконтролююча ПАХ,
що конденсує випари й вимірює відповідне навантаження від власної маси.
Якщо на пристрій на ПАХ нанести хімічно сорбційний полімер, вийде датчик
хімічних випарів. Додавання ще одного пристрою на ПАХ дозволить мінімізувати
коливання температури й забезпечить контрольовану різницеву частоту.
Біодатчик. Подібно датчикам хімічних випарів, біодатчики визначають
наявність хімічної речовини, але скоріше в рідинах, чим у парах. Як було
замічено раніше, пристрій на ПАХ у цьому випадку не підходить, тому що
вертикальний компонент поширення хвилі буде придушуватися рідиною. Біодатчики
вироблялися з використанням TSM резонатора, SH-APM й SH-ПАХ датчиків. Із всіх відомих
акустичних датчиків для виміру рідини, найбільшою чутливістю володіє датчик
хвиль Лові, спеціального класу
горизонтальний^-горизонтальних-горизонтальні-поперечно-горизонталАЕих ПАХ. Для
того щоб створити датчик хвилі Лові, волноводное покриття міститься на пристрій
на SH-ПАХ таким чином, що енергія поперечно-горизонтальних хвиль фокусируется
на цьому покритті. Потім біорозпізнавальне покриття міститься на волнопроводное
покриття, утворюючи повний біодатчик. Було досягнуто успішне розпізнавання
anti-goat Ig у концентрації 3 3 10-8-10-6 moles при використанні 110 Мгц
yz-зріз SH-ПАХ з полімерним покриттям провідну хвилю Лява.
4. КОНСТРУКЦІЯ ТА ПРИНЦИП ДІЇ термодатчика НА
АКУСТИЧНИХ ХВИЛЯХ
4.1 Принцип дії та функціональна схема термодатчика
Швидкість V
акустичних поверхневих хвиль чутлива до температури пропорційно kV коефіцієнту першого порядку
та залежить від коефіцієнтів більш високого порядку (квадратичного, кубічного),
які для різних видів матеріалу детально визначено в науково-технічній
літературі. Для кварцу У- зрізу ця залежність є зручною – лінійною
D V =kV Т V.
Крім того, кварц є найстабільнішім з доступних в Україні матеріалів.
Зорієнтуємось на кварц у побудові пасивного термодатчика.
Час затримки хвилі в лінії затримки на термодатчику змінюється DTі відповідно зі зміною цією швидкості
DTі=Lі/ D V.
Термодатчик є пасивним, оскільки він не містить елементів живлення.
Опитуваня термодатчику здійснюється за допомогою радіолокаційної системи (РЛС)
1 середньої точності та середньої потужності. На самому термодатчику
знаходиться антена (рис.4.1), яку з‘єднано зі зустрічно-штирьовим перетворювачем
(ЗШП) 3. Посланий РЛС сигнал проходить відстань L0 близько 4 м до термодатчика, приймається антеною
та за допомогою ЗШП 3 перетворюється у ПАХ, яка біжить по підложці спочатку до
відбивачів (їх повинно бути не менше двох), відбивається від них і прямує назад
до ЗШП . Втрати потужності при цьому складають не менше 3дБ. Відбитий
ослаблений сигнал антеною термодатчика повертається назад до РЛС , проходячи
знову відстань L0. Час Tі, який проходить від випромінення
сигналу РЛС до його приймання тою ж РЛС від термодатчика
T1= L1/V+T0,
T2= L2/V+T0.
В цій системі рівнянь є дві невідомі: T0 – початковий час затримки
радіосигналу, та V, які визначаються після її
розв‘язання. Оскільки швидкість ПАХ залежить від температури, то і зміна часу
затримки DTі буде залежати від температури
DTі»Lі/
(kV Т V)
+T0
|
|
|
|
|
|
DTі=Lі/ (kV
VТ)+T0
T0= Lі/ V+2L0/cсв
|
|
|
|
|
 |
kT – коефіцієнт термочутливості часу затримки
kV – коефіцієнт термочутливості фазової швидкості
L0 – відстань від антени
передавача до антени приймача (до 4 м)
Lі – відстань від ЗШП до одного з відбивачів (біля 9 мм)
cсв – швидкість світла (300 тис.км/с)
V – фазова швидкість ПАХ (біля 3 км/с)
DTі – зміна часу затримки відбитого сигналу
Т – вимірювана температура
Рисунок 4.1 Функціональна схема термодатчика
Хоча ця залежність нелінійна, однак kV настільки малий, що
нелінійністю можна знехтувати.
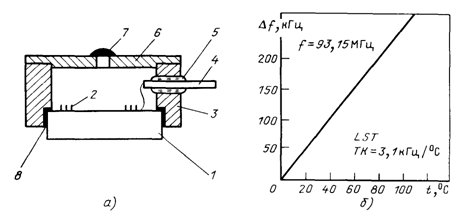
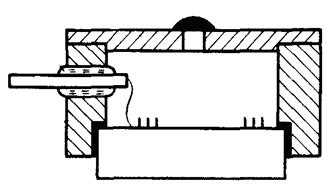
Рисунок 4.2 Термодатчик на
ПАВ
а - конструкція ТЧР; б - ТЧХ датчика LST-Зрізу;
1 - кварцова подложка; 2 - ВШП; 3 - корпус; 4 - гермоввод; 5 - кераміка; 6 - посріблена
кришка; 7 - герметизирующее ущільнення; 8 - епоксидний клей
4.2. Конструкція термодатчика
Основним елементом конструкції є (рис.4.1, 4.2) чутливий елемент у
вигляді лінії затримки на кварцовій підложці У-зрізу. Лінію затримки виконано у
вигляді рознесених ЗШП 3 із п‘яти пар штирів та відбивачів 5 по 1 штирю в
кожному, сформованих методом фотолітографії на поверхні кварцу шарами
хром-мідь-нікель.
Чутливий елемент за допомогою спеціального адгезійного клеючого складу
встановлено в діелектричній прокладці , яка не дозволяє електричним наводкам у
корпусі впливати на чутливий елемент. Прокладку в свою чергу приклеєну до
корпусу. Оскільки температурні покази не залежать від якості кріплення
чутливого елементу, єдиними вимогами до клейового з’єднання є його
термостійкість та надійність.
Термодатчик має дуже малі габаритні розміри - його висота лише декілька
міліметрів. Приєднання гвинтами для таких малих приладів стає складним, майже
неможливим. Тому для того, щоб приєднати до корпусу кришку, сформовано в обох
елементах декілька виступів , які з попереднім натягом входять один в інший і
вклеюються.
В нижній частині корпусу сформовано виступи з отворами, які по-перше,
дозволять міцно приєднати термодатчик до об‘єкту контролю, по-друге дозволяють
на днищі корпусу вклеїти антену термодатчику. Кінці цієї спіральної антени підключаються
через отвір у підкладці та корпусі до ЗШП лінії затримки. Отвір у корпусі
герметизується.
5. ВИЗНАЧЕННЯ НЕОБХІДНИХ ПАРАМЕТРІВ, ЯКІ ВПЛИВАЮТЬ НА ПОВЕРХНЕВІ
АКУСТИЧНІ ХВИЛІ В ПАСИВНИХ ЕЛЕМЕНТАХ
Датчики на акустичних хвилях - надзвичайно універсальні пристрої, чий
комерційний потенціал тільки починають усвідомлювати. Вони конкурентоздатні за
ціною, міцні, дуже чутливі, і надійні, тому ж деякі з них є бездротовими й/або
не вимагають елементів живлення. Бездротові датчики досить зручні для використання
їх на об'єктах, що рухаються, наприклад, для виміру тиску покришок на машинах
або крутному моменті вала. Датчики яким не потрібна енергія бажані для
вилученого спостереження за хімічними випарами, вологістю й температурою. Інші
застосування включають вимір сили, прискорення, ударної хвилі, кутової
швидкості, в'язкості, зсуву й потоку, як доповнення до характеристики плівки.
Датчики також володію електроакустичною чутливістю, що дозволяє їм визначати
рівень р, іонних домішок й електричні поля. Датчики поверхневої акустичної
хвилі показали себе як самі чутливі загалом, що є результат їхньої великої
щільності енергії на поверхні. Для виміру рідин самими чутливими показали себе
датчики хвиль Лові, спеціального класу поперечно-горизонтальних поверхневих
хвиль. Триває робота з розробки даних датчиків для застосування їх в інших
областях.
Деякі важливі властивості елементів, виготовлених з п'єзоелектричних
матеріалів, у тому числі елементів на ПАХ, визначаються не абсолютними
значеннями матеріальних констант, а їхнім взаємним співвідношенням Одним з
таких параметрів є коефіцієнт електромеханічного зв‘язку. При визначенні
коефіцієнта електромеханічного зв'язку в елементів на ПАХ у першу чергу
становить інтерес динамічний стан. Пружний рух спостерігається лише в тонкому
поверхневому шарі підкладки, уздовж якого поширюється ПАХ, що необхідно
враховувати при розгляді відповідних видів енергії. Коефіцієнт
електромеханічного зв'язку з урахуванням цього положення, описувався б складним
вираженням, а його величина була б функцією глибини середовища. Тому за
аналогією з об'ємними хвилями коефіцієнт електромеханічного зв'язку для
елемента на ПАХ визначається звичайно як відношення зміни швидкості поширення
хвилі в не п’єзоелектричному середовищі до швидкості в п’єзоелектрику.
Позначимо фазову швидкість поширення поздовжньої хвилі в не
п’єзоелектричному середовищі Vо, а фазову швидкість поширення цієї ж хвилі в п’єзоелектрику
V. Можна записати
де r — щільність середовища. Для коефіцієнтів жорсткості с11
і с11(р) можна записати співвідношення
де k1-коефіцієнт електромеханічного зв'язку для поздовжньої
хвилі. Із цих рівностей можна одержати:
Таким чином, відносна зміна фазової швидкості ідеальної об'ємної
поздовжньої хвилі, викликана п'єзоелектричним ефектом, пропорційна квадрату
коефіцієнта електромеханічного зв'язку для цієї хвилі.
У випадку ПАХ її швидкість зміниться, якщо вільну поверхню п’єзоелектрика
покрити ідеально провідним шаром, товщиною якого можна зневажити. Зміна
швидкості ПАХ викликано тією обставиною, що провідний шар закорочує складову
електричного поля, що паралельна поверхні. Це явище має велике значення для
практичних застосувань, особливо при збуренні ПАХ за допомогою перетворювача. У
зв'язку із цим теоретично й експериментально були визначені швидкості ПАХ на
вільній і металізованій поверхнях для різних напрямків поширення хвиль і різної
орієнтації поверхні. Якщо позначити через Dv різницю між швидкістю на
вільній поверхні v й і швидкістю
на металізованій поверхні v о,
то величину Dv / v о
можна вважати мірою зв'язку.
Коефіцієнт електромеханічного зв'язку k для ПАХ, як і для поздовжньої
хвилі, визначається співвідношенням
Це співвідношення підтверджене експериментально. Також в інший спосіб
визначено коефіцієнт електромеханічного зв'язку:
Тут ΔVµ = Vµ — Vo, при
цьому Vµ — фазова
швидкість ПАХ у випадку «вільних» граничних умов [тобто поверхневий імпеданс Zp
прилягаючого середовища нескінченний і діелектрична проникність для даного
середовища дорівнює нулю, що практично важко здійсненно] й Vo — фазову швидкість при «закороченных»
граничних умовах (Zp = 0, що прилягає середовище провідна). Зв'язок
з визначенням задається співвідношенням

де
Для рішення завдання про поширення ПАХ необхідно знати інтенсивність і
напрямок потоку енергії. Перенос енергії у випадку гармонійної зміни в часі
всіх величин при квазистатическом наближенні електричного поля можна
характеризувати в будь-якій крапці середовища (використовуючи електроакустичну
аналогію) за допомогою комплексного вектора Пойнтинга р — поняття, широко
використовуваного в теорії електромагнітного поля. Інтенсивність ПАХ в напрямку
осі Х обумовлена як середнє значення потужності, що пройшла через одиницю
поверхні перпендикулярно осі, є дійсною складовою i-ої компоненти комплексного
вектора Пойнтинга:

де символ Re позначає дійсну складову, а зірочкою відзначені
комплексно-сполучені величини. Наведені величини дані в масштабі амплітуд. У
випадку непьезоелектрического середовища відсутній член jDi* у виразі для р і п'єзоелектричний
внесок ekijEk у виразі для Tij.
Інтенсивність ПАХ в обраному напрямку, обумовлений формулою для р,
зменшується в напрямку вглиб середовища. В елементах електроніки на ПАХ нас, як
правило, цікавить інтегральна величина - загальний потік енергії ПАХ в даному
напрямку, що лежить у площині границі двох середовищ. При цьому маємо на увазі
середню енергію, що ПАХ переносить на поверхні в смузі шириною 1 м:
За винятком випадків псевдоповерхневих хвиль, які будуть описані нижче,
величина P3 = 0, і потік енергії ПАХ паралельний
поверхні.
В анізотропному середовищі в загальному випадку напрямок потоку енергії ПАХ
не паралельний напрямку її поширення. Відхилення потоку енергії від напрямку
поширення можна характеризувати відношенням величин Р1/P2 заданих останнім виразом. Випадок
коли напрямок, поширення ПАХ, обумовлений хвильовим вектором, збігається з
напрямком потоку енергії ПАХ, називається чистою модою ПАХ.
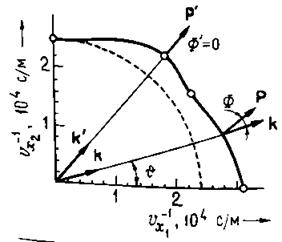
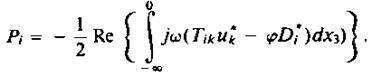
Рисунок 5.1 Криві повільності для ПАХ, що поширюються в площині (110) у
нікелі
Оскільки нас цікавить напрямок потоку енергії, можна також використати
таке поняття, як крива повільності (рис. 5.1). Цю криву одержимо, відкладаючи в
напрямку поширення ПАХ значення, обернено пропорційні її швидкості.
Напрямок групової швидкості, тобто напрямок потоку енергії (вектора Р),
для даного напрямку поширення ПАХ, певного хвильовим вектором, задано напрямком
нормалі до кривої повільності. На рис. 5.1 кут t визначає напрямок поширення й
Ф — кут між векторами Р и к, тобто кут відхилення потоку енергії від напрямку
поширення. Із кривої на рис. 5.1 можна визначити напрямку, уздовж яких
поширюються чисті моди ПАХ (вони позначені кружечками), що характеризуються
тим, що вектори Р и к колінеарні. Наприклад, для напрямків, близьких до кута υ
= 90° (рис. 5.1), потік енергії ПАХ відхиляється в напрямку υ = 90°, отже,
пучок ПАХ фокусується.
Для ПАХ в ізотропному середовищі Використаємо загальне рішення, наведене
в попередніх розділах, для випадку поширення ПАХ в ізотропному
неп'єзоелектричному напівпросторі. Із властивостей вектора поляризації треба,
щоб механічні змішання в цьому випадку мають місце лише в сагітальній площині.
Пружні коливання назвемо поверхневою хвилею Релея. Запишемо рівняння для
розрахунку фазової швидкості vr,
які виходять з вікового рівняння системи:

де vt й vi являють собою відповідно швидкість
поперечних й повздовжніх об'ємних хвиль, що завжди більше швидкості ПАХ Релея vj
. Для складових змішань при поширенні уздовж осі Xi дійсні
співвідношення мають позитивні дійсні значення, з -пр вільна константа, що
залежить від інтенсивності ПАХ. З формули слідує, що поздовжня (U) і поперечна
(V) складові змішання зсунуто по фазі на 90°, що є причиною еліптичного руху
часток. На рис. 5.2 показана залежність амплітуд коливань хвиль Релея від відстані
до поверхні. З малюнка видно, що хвиля торкає шар під поверхнею товщиною лише
кілька довжин хвиль.
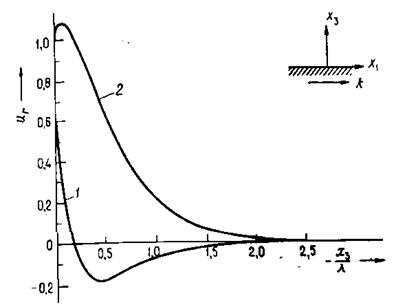
Рисунок 5.2 Залежність складових ПАХ Релея від глибини, вираженої в
одиницях довжин хвиль
Крива 1 — поздовжня складова з негативним знаком, крива 2 — поперечна
складова; криві нормовані відносно амплітуди поперечної складової на поверхні
ізотропного твердого тіла.
Вектор Пойнтинга паралельний напрямку поширення хвилі й швидко зменшується
із глибиною (-х3). Рух середовища, викликане ПАХ Релея, наочно зображено на 5.3,
де показана деформація прямокутної сітки в сагиттальній площини. Дійсні зсуви
становлять величини порядку 10-5 довжини хвилі ПАХ.
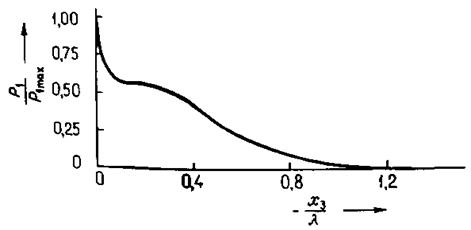
Рисунок 5.3 Залежність інтенсивності хвиль Релея
Залежність інтенсивності хвиль нормованої по одиничній амплітуді на
поверхні ізотропного твердого тіла, від глибини, вираженої в одиницях довжин
хвиль
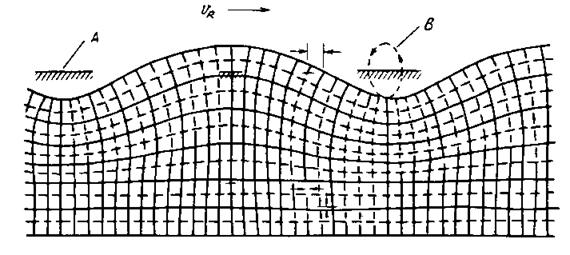
Рисунок 5.4 Деформація прямокутної сітки в сагітальній площини, викликана
ПАХ Релея в ізотропному середовищі
А —
незбурена поверхня, В — рух поверхні, викликаний ПАХ
Інтервали позначають зсув у різних крапках твердого тіла.
Деякі основні властивості ПАХ в анізотропному середовищі аналогічні
властивостям ПАХ Релея. Вони мають еліптичну поляризацію, перенос хвильової
енергії відбувається в приповерхньому шарі й фазовій швидкості не залежить від
частоти. Однак анізотропія може вносити ряд відмінностей. Наприклад, фазова
швидкість залежить від напрямку поширення, і потік енергії не обов'язково
паралельний хвильовому вектору. Площина еліптичної поляризації хвилі може не
збігатися із сагітальною площиною, і в тих випадках, коли вона збігається з
нею, головні осі еліпса (рис. 5.4) не обов'язково паралельні осям Х1
н Х3. Загасання амплітуди хвилі в загальному випадку відбувається не
за експонентним законом, а по синусоїді з експоненциально загасаючою
амплітудою. Якщо анізотропне середовище має п'єзоелектричні властивості, то
крім трьох складових механічних змішань існує й електричний потенціал, завдяки
чому швидкість поширення ПАХ стає залежної від електричних умов на поверхні або
поблизу її. У цьому випадку ПАХ супроводжується електричним полем з еліптичною
поляризацією в сагітальної площини.
Підкладки для ПАВ можна вибирати із цілого ряду комбінацій орієнтації
поверхні, напрямку поширення хвилі й кристалографічної симетрії середовищ.
Найбільш широке поширення одержали матеріали з відносно високою
кристалографічною симетрією. Це пов'язане з тим, що напрямок потоку енергії в
них паралельно хвильовому вектору. Ці напрямки відповідають екстремумам криво
повільності (рис. 5.1). Деякі екстремуми визначаються значенням пружних і п'єзоелектричних
констант, інші тільки кристаллографічною симетрією середовища. Необхідною й
достатньою умовою для існування чистої моди є задоволення однієї з наступних
умов:
А) Якщо
сагітальна площина (Х1, Х3) є площиною дзеркальної
симетрії, то вісь X1 являє собою напрямок поширений чистої моди.
Рішення розпадається на дві незалежні частини: одна містить складову змішання и2,
друга — складові и1, и3, j .
Б) Якщо
сагітальна площина перпендикулярна осі симетрії другого порядку кристалу, та
вісь Х1 є напрямком поширення чистої моди. Рішення розпадається на
дві незалежні частини, одна з яких містить складові и1 й и3,
друга — иг , j .
Наведені випадки, коли детермінанти систем рівнянь розпадаються на дві
незалежні частини, називають вирожденими. Нижче розглянуті три випадки, коли
задовольняються обоє умови або одне з них.
Напрямку поширення чистої моди, що задовольняють умовам А и Б
Середовище, у якій обоє умови задовольняються одночасно, не може бути п'єзоелектричним,
тому що має центр симетрії. Як приклад можна привести поширення ПАВ у напрямку
кристалографічної осі уздовж базової площини неп'єзоелектричного кристала з
кубічною симетрією. У цьому випадку рішення рівняння розпадається на дві
незалежні частини. Складова и2 приводить до появи об'ємної
поперечної хвилі, що задовольняє граничним умовам на поверхні. Із другої
частини рішення одержимо дві константи b(т), які на відміну від ізотропного
середовища не обов'язково будуть розташовуватися на негативній мнимій осі, тому
що 2с44≠c11-c12. Дійсні частини констант b(т) приводять до осциллирующей амплітуди
змішання, у той час як мнимі частини характеризують загасання.
Направлення поширення чистої моди, що задовольняють умові А.Цей випадок з найпоширеніших,
він відповідає орієнтації поширення ПАХ уздовж осі Х3 на поверхні Х1Х2
кристала ниоба-та літію (клас 3т). Оскільки для вираження дійсно Г12
= Г23 = Г24 = 0, рішення розпадається на дві незалежні
частини. Одне рішення, що задовольняє граничним умовам, містить лише складову
змішання й, отже, приводить до об'ємної хвилі, по-Ризованной перпендикулярно
сагітальній площини. Ця об'ємна на відрізняється від хвилі, розглянутої в
попередньому випадку, тим, що хвильовий вектор відхилений від поверхні (у
напрямку усередину середовища). У той час як напрямок потоку енергії паралельно
осі Х1. Друге рішення, що містить потенціал j і дві складові и1 і и3,
представляють собою ПАХ Релея в п’єзоелектрики.
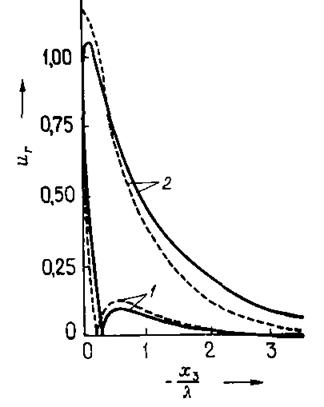
Рисунок 5.5 Залежності поздовжніх (криві 1) і поперечних (криві 2) складового
змішання ПАХ, що поширюється на зрізі YZ кристала ніобата літію, від глибини,
вираженої в одиницях довжин хвиль
Суцільні криві відповідають вільній поверхні, переривчасті - скороченій;
криві нормовані щодо амплітуди поперечної складової на поверхні.
Значення швидкості й форма залежать від електричних граничних умов.
Приймаючи, що X3 > 0 простір заповнений середовищем з
діелектричної постійної Ео (вільна поверхня) і складові електричної індукції D3,
а також потенціал j безперервні, одержимо для наведеного приклада значення швидкості ПАХ,
рівне 3485 м/с. Якщо поверхня покрита тонким провідним шаром, то тангенціальна
складова електричного поля ПАХ на поверхні дорівнює нулю, а фазова швидкість
зменшиться до величини 3405 м/с. Залежності складові змішання й потенціалу для
цих двох випадків зображені на рис. 5.5 .
Електрично скорочені поверхні особливо впливають на хід кривих
електричного потенціалу (рис. 5.6). Так само, як й в ізотропному середовищі,
рух часток відбувається лише в тонкому шарі під поверхнею підкладки товщиною в
кілька довжин хвиль. Потік енергії Рі, має лише складову Р1,
отже, його напрямок паралельно вектору поширення хвилі.
Коефіцієнт електромеханічного зв'язку, обумовлений вираженням для
наведеної орієнтації підкладки з ниобата літію у випадку поширення чистої моди
ПАХ має одне з найбільших досяжних значень к2 = 0,046, для кварцу
0.001.
Вимірювані значення швидкості поширення ПАХ на вільній і металізованій
частинах поверхні підкладки з ниобата літію, паралельної площини XZ, залежно
від кута, утвореного напрямом поширення ПАХ і віссю Z, наведені на рис. 5.7. Електричне
скорочення поверхні здійснено шаром алюмінію товщиною h =23Онм.
Крива повільності для кутів в околиці осі Z представлена рис. 28. Якщо
кут відхилення хвильового вектора від осі Z становить 10 град., той напрямок
потоку енергії відхилено від хвильового вектора на 3 град.
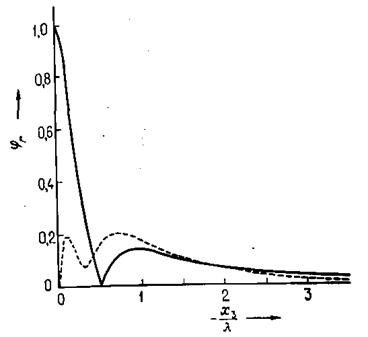
Рисунок 5.6.
Залежність електричного потенціалу від глибини
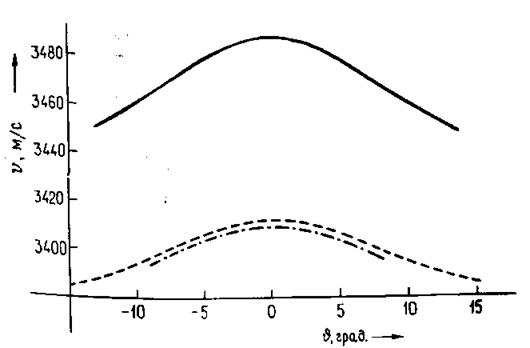
Рисунок 5.7 Залежність швидкості ПАХ, що поширюється уздовж У-зрізу
кристала ниобата літію, від кута відхилення хвильового вектора (в інтервалі
кутів д = ± 10°) від осі Z, обмірювана за допомогою лазерного інтерферометра
Суцільна крива відповідає вільній поверхні, переривчаста – скороченій
шаром алюмінію товщиною 68 мм, штрих пунктирна – скороченим шаром алюмінію товщиною
230 мм.
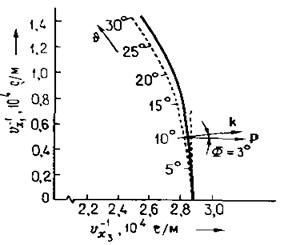
Рисунок 5.8 Криві повільності для ниобата літію YZ зрізу (суцільна крива)
і для ізотропного середовища (переривчаста крива)
Більш складний характер ПАХ в порівнянні із плоскими об'ємними хвилями
особливо яскраво проявляється в явищі, пов'язаному з відбиттям хвиль. Об'ємна
хвиля описується одним хвильовим фронтом, тому, вибравши необхідну частоту,
можна домогтися, щоб на плоскому розділі змішання або його похідна (акустична
швидкість) були дорівнюють нулю. При цьому умові відбувається повне відбиття
об'ємної хвилі від вільної або закріпленої поверхні. Прикладом може служити
п'єзоелектричний резонатор у формі пластини.
Для ПАВ характерним є еліптичний рух часток у сагітальній площині. У
зв'язку із цим поверхневу акустичну хвилю можна розкласти на дві хвилі:
поздовжню й поперечну, поляризовані в сагітальній площини й зсунуті по фазі на
90° (вплив анізотропії середовища враховувати не будемо).
Фазовий зсув приводить до того, що неможливо знайти таку частоту, при
якій у певнім місці (наприклад, на ідеальному ребрі) амплітуди обох хвиль
виявилися б одночасно рівними нулю або максимальними. Отже, не можна одержати
повне відбиття, можливо лише часткове відбиття.
Зсув, що відповідає ПАХ, задовольняє граничній умові нульовому значенню
механічної напруги на плоскій поверхні досить далека від ідеального ребра.
Однак при нульовій амплітуді хвилі на ребрі й у безпосередній близькості від
нього граничні умови не виконуються. Для їхнього виконання необхідно припустити
існування об'ємних хвиль поблизу ребра.
Це можна пояснити сприянням деформації еліптичним рухом часток у хвилі, в
результаті чого виникає лінійно поляризована хвиля типу об‘ємної хвилі.
Наслідком такого ефекту є те, що відбивається лише мала частина ПАХ. Мале
значення коефіцієнта відбиття привело до того, що елементі, що здійснюють
відбиття ПАХ , більше, ніж елементів, що перетворюють ПАХ. В частині, де
стрибком змінюються пружні властивості або граничні умови, частково
відбивається також і об‘ємна хвиля. Доцільно припустити, що часткове відбиття
відбулося на початку системи координат. Розповсюджені випадки відбиття від
сходинки показані на рис.5.9.
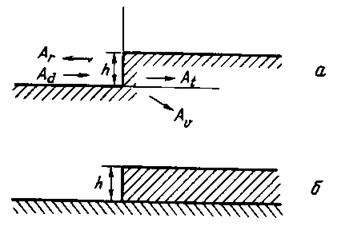
Рисунок 5.9 Ідеалізоване подання стрибкоподібних змін властивостей
поверхні, викликаних частковим відбиттям ПАХ:
а —
сходинка, утворена видаленням самого матеріалу; б — сходинка, утворена
нанесенням металевого або діелектричного шару.
(Аd — амплітуда падаючої ПАХ, Ar— амплітуда відбитої ПАХ, Аt — амплітуда попередньої ПАХ й Аv амплітуда виниклої об'ємної
хвилі.)
Відбиття ПАХ можна описати комплексним коефіцієнтом відбиття

Тут Ad = Ао — амплітуда падаючої ПАХ; Аr – Гoе — амплітуда відбитої ПАХ,
причому jг-фазове зрушення при відбитті; k -хвильове число, рівне 2 p/l; Го, Гr, Гi відповідно
амплітуда, реальна й мнима частини коефіцієнта відбиття. Фазове зрушення,
викликаний наявністю об'ємних хвиль у місці стрибкоподібної зміни фізичних
величин, як правило, є малою величиною й у першому наближенні їм можна
знехтувати, тобто
Г = Го = Гг.
Визначення коефіцієнта відбиття ПАХ представляє дуже складне теоретичне
завдання. На відміну від коефіцієнта електромеханічного зв'язку коефіцієнт
відбиття не можна визначити виходячи тільки із властивостей ПАХ. Теоретично
його можна записати у вигляді наступного ряду

де go, gi, gi — коефіцієнти, отримані експериментальним шляхом, h -
висота сходинки, l - довжина хвилі ПАХ. При цьому висота сходи величина позитивна, якщо
сходинка спрямована нагору. Як правило можна обмежитися лінійною частиною
виразу.
Це співвідношення є основним при проектуванні пристроїв з відбивачами
ПАХ, оскільки дозволяє, задавшись висотою сходи, передбачити величину
коефіцієнта відбиття ПАХ. Коефіцієнт g0 не дорівнює нулю лише у випадку
провідного шару й у першому наближенні його можна записати в такий спосіб:
де v_швидкість ПАХ на вільній поверхні, vo — швидкість на
металізованій поверхні й gо — коефіцієнт електромеханічного зв'язку.
Однак можуть бути відхилення від цього виразу.
У випадку А < 0 (сходинка утворена вибіркою матеріалу або нанесенням
діелектричного шару), як правило, |Л| <t 2 і коефіцієнт відбиття
пропорційний висоті сходи, тобто Г, = giAA. Для сходинки, спрямованої вниз (А
< 0), коефіцієнт відбиття має негативний знак, тобто на такій сходинці ПАХ
відбивається з фазовим зсувом 180°.
Для мнимої частини коефіцієнта відбиття дійсне вираження, аналогічне,
однак фізичний зміст має тільки квадратичний член

Через те що коефіцієнт відбиття від однієї елементарної неоднорідності
має малу величину, у пристроях на ПАХ використають рефлектори (відбивачі), яких
багато, що мають відбиваючих елементів порядку декількох сотень. Звичайно
відбивач реалізується за допомогою системи канавок (рис. 5.10, а), які формують
шляхом травлення, або системи провідних смужок на п'єзоелектричній підкладці
(рис. 5.10, б). Металеві смужки можуть бути або ізольований одна від одної
(вільні), або взаємно скорочені. У деяких випадках елементи відбивача
створюються у вигляді діелектричних шарів з використанням методу іонної
імплантації або дифузії металу.
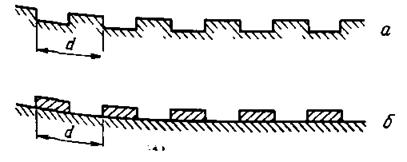
Рисунок 5.10 Відбивач ПАХ:
а - система канавок, б - система смужок
Основними характеристиками рефлектора є довжина d, тобто період і
коефіцієнт відбиття. Умова відбиття ПАХ від рефлектора наступна
kd + km=kr
Тут kd і kr - хвильові вектори падаючих і відбитої
хвиль, які дорівнюють
kd=nd2p/ld , kr=nr2p/lr
Вектор km запишемо у вигляді
km=no2p n/d,
де no — одиничний вектор, перпендикулярний ребрам рефлектора й
спрямований від нього до його входу, а ціле число п — порядок відбиття.
Співвідношення є точним лише для відбивача з нескінченним числом елементів.
Якщо число елементів кінцеве, то варто визначити напрямок, у якому відбита ПАХ
має максимальну амплітуду.
Температурна залежність швидкості ПАХ подібно температурної залежності
резонансної частоти резонаторів на об'ємних хвилях виражають за допомогою
перших трьох членів статичного ряду
де DV - різниця значень швидкості
ПАХ при температурах q0 та поточній, a Тu(n)— температурний коефіцієнт і-го порядку
швидкості ПАХ
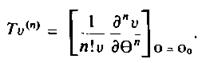
Через те, що швидкість ПАХ є функцією пружних, п'єзоелектричних і
діелектричних постійних підкладок, температурний коефіцієнт швидкості ПАХ також
буде функцією цих постійних й їхніх температурних залежностей.
При виборі орієнтації підкладки прагнуть, щоб температурний коефіцієнт
швидкості ПАХ першого порядку був якнайближче до нуля, а температурні
коефіцієнти більше високого порядку як можна меншої величини. І хоча при
проектуванні елементів на ПАХ насамперед виходять із температурного коефіцієнта
швидкості ПАХ, слід зазначити, що необхідно враховувати й теплове розширення
самої підкладки.
при поширенні ПАХ від місця порушення хвилі до місця її
приймання частина енергії хвилі губиться (втрати енергії пучка ПАХ). Розрізняють
втрати, викликані геометрією, і втрати, викликані загасанням ПАХ. Причинами
втрат першого типу є:
1) відхилення напрямку поширення енергії від напрямку фазової швидкості;
2) дифракція пучка ПАХ (рис. 5.11, б), т. з розмиті границі пучка й зміна
його профілю.
Втрати, пов'язані із загасанням, проявляються зменшенням інтенсивності
пучка зі збільшенням відстані від вхідного перетворювача (рис. 5.11, в). На
загасання ПАХ впливають наступні фактори:
1) взаємодія з тепловими коливаннями ґрат;
2) розсіювання на нерівностях поверхні;
3) розсіювання на дефектах кристалічних ґрат (дислокаціях, домішках і
т.д.);
4) взаємодія поверхні із зовнішнім середовищем,
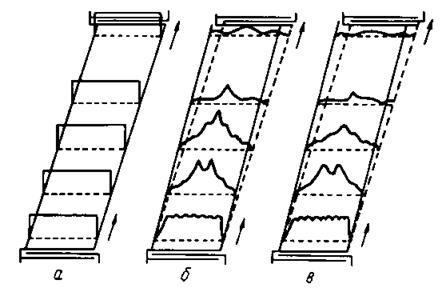 ]
]
Рисунок 5.11 Відображення втрат енергії пучка за допомогою профілів
відносної амплітуди ПАХ, що поширюється між вхідним і вихідним перетворювачами:
а —
ідеальний випадок; 6 — дифракція пучка; в — дифракція пучка й загасання
Окремі складові загасання ПАХ різним образом залежать від температури,
частоти, геометрії й властивостей середовища (рис.5.12).
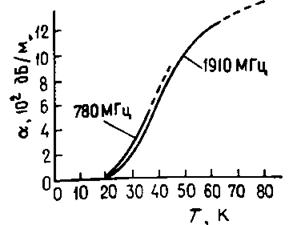
Рисунок 5.12 Залежність втрат від температури
Відповідно до теорії твердого тіла ПАХ можна розглядати (особливо в
області високих частот і низьких температур) як поверхневі фонони й пояснювати
загасання ПАВ як взаємодія поверхневих фононів з дефектами кристалічних ґрат.
Із цієї теорії сліду ст, що загасання фононів ПАХ відбувається аналогічно
загасанню об'ємних фононів. Температурні залежності коефіцієнта загасання а дл
ПАХ при різній частоті зображені на рис. 5.12.
В області низьких температур (нижче 10 К) коефіцієнт загасання постійний,
потім при підвищенні температури різко зростає. При високій температурі (300
К) його залежність від температури слабка. Границя між цими областями
залежить від частоти. При низьких температурах головну роль грає розсіювання
ПАВ на нерівностях поверхні, примісних атомах і дислокаціях. Загасання не
залежить від температури, але залежить від частоти. При переході до більше
високих температур починає проявлятися розсіювання на теплових фононах ґрат, і
різко зростає (пропорційно четвертого ступеня температури), причому проявляється
й частотна залежність. При кімнатній температурі ос росте пропорційно квадрату
частоти й слабко залежить від температури.
Інтерес представляє вплив прилягаючого середовища, що складає з
напівпровідникового шару, у якому діє постійне електричне поле. У цьому випадку
відбувається взаємодія між носіями, що рухаються, зарядів у напівпровіднику й
хвилею, що рухається. Якщо швидкість зарядів перевищить швидкість ПАХ, то
останні можуть підсилюватися. У літературі описаний ряд успішних спроб
посилення ПАХ. Однак поки не досягнуть той результируюший ефект, що дає
пасивний елемент на ПАХ з послідовно
включеним активним підсилювачем. Тому описані вище активні елементи на ПАХ поки
не знаходять практичного застосування.
6. РОЗРАХУНКИ ОСНОВНИХ ПАРАМЕТРІВ ТЕРМОДОТЧИКА
6.1 Розрахунок порогової чутливості термодатчика
Порогову чутливість термодатчика визначимо як відношення чутливості dТ=0,2 мкс до часу затримки
радіолокаційного сигналу РЛС середньої точності до зміни часу ПАХ в лінії затримки
DТ=2L / (V kV)
довжиною L=10 мм в діапазоні вимірювання температури TВМ
ST = TВМ´dТ/(2L / (V kV))=
0.15´10-3
K
де V =3159 м/с швидкість ПАХ у кварці У-зрізу, kV= –24*10-6
1/К - її термочутливість.
Однак на вимірювання термодатчику будуть впливати інші невимірювані
параметри, як то зміна тиску Р чи превантаження (в тому числі центробіжні та
лінійні), перешкоди в радіолокаційному каналі. Для вимірювання та компенсації
цих впливів, а також для однозначного визначення досить малопотужного імпульсу
відгуку термодатчику на підложці формується декілька відбивачів (рис. 1)
6.2 Розрахунок
термодатчика на теплову інерційність.
Розділяють дві задачі теплової інерційності:
1. Тепловиділення всередині елементу ЕА (рис.6.1,а);
2. Вирівнювання температури елементу ЕА із зовнішнім (рис.6.1,б).
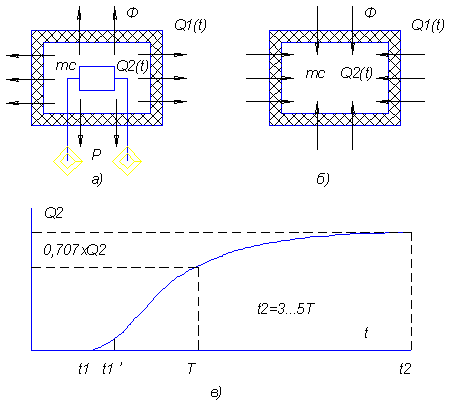
Рисунок 6.1 Динамічні властивості термодатчика
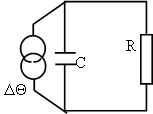

Рисунок 6.2 Електричний аналог ланки (аперіодичної першого порядку) з
тепловою інерційністю
В випадку 1 всередині елементу масою m і теплоємністю c виділяється
потужність Р і температура Q2 зростає до встановленого значення:
 ,
,  ,
,  .
.
де S – поверхня теплоообміну, x– коефіцієнт тепловіддачі, Т – постійна часу.
В випадку 2 в момент часу t1 відбувається стрибок температури Q1 зовнішнього середовища і внутрішня
температура Q2 до неї вирівнюється:
 ,
,  .
.
Від t1 до t2 (рис.6.1,в) формуються температурні градієнти, за час Т –
постійну часу – відбувається 70% перехідного процесу. За час 3…5Т перехідний
процес вважається майже завершеним.
Довідкові відомості щодо параметрів теплообміну найбільш розповсюджених
матеріалів представлено в табл.5, 6, 7.
Таблиця 5.
Коефіцієнти тепловіддачі для типових деталей, x, Вт/(м2К)
| Одинична
деталь (конденсатор, резистор, транзистор) і одинична плата із ізоляційного
матеріалу, розташованого вертикально |
15 |
| Декілька
близько розташованих вертикальних плат |
11…12,5 |
| Декілька
близько розташованих горизонтальних плат |
6…7 |
| Одинична
металічна пластина (пластина радіатора охолодження) |
18…20 |
| Електрична
котушка (в залізному сердечнику) |
30 |
Таблиця 8.
Питома теплоємність типових твердих матеріалів
| Тип матеріалу |
Важкі метали
(мідь, латунь, залізо) |
Легкі
матеріали (алюміній фосфор, слюда) |
Для органічних
матеріалів (текстоліт, гетінакс, оргскло) |
| с, Дж/(кг×К) |
400 |
800 |
1200 |
Таблиця 9.
Коефіцієнти тепловіддачі корпусу, x, Вт/(м2К).
| Тип корпусу |
Розташування
тепловиділяючого елементу |
| біля дна |
бокова стінка |
верхня стінка |
| Металевий
сірий |
10 |
14 |
14 |
| Пластмасовий
чорний |
4 |
8 |
10 |
Для ЕА вагою 1…3кг Т=20…30хв., промислових термометрів Т=3…6хв.
Зменшення постійної часу можливо:
1)
зменшенням
розмірів:
(для металевої нитки Æ25мкм постійна часу 0,8с);
2)
примусовим
обтіканням збільшити коефіцієнт тепловіддачі:
 ,
,
де  -
число Рейнольда, V - швидкість повітря (при нагріві 200°С для швидкостей потоку 10 і
100 м/с коефіцієнти тепловіддачі 1250 і 3160 Вт/(м2К) і постійні
часу термодатчика 15 і 6 мс).
-
число Рейнольда, V - швидкість повітря (при нагріві 200°С для швидкостей потоку 10 і
100 м/с коефіцієнти тепловіддачі 1250 і 3160 Вт/(м2К) і постійні
часу термодатчика 15 і 6 мс).
7. ЕКОНОМІЧНА ЧАСТИНА. РОЗРАХУНОК ВАРТОСТІ ВИРОБНИЦТВА
Кошторис витрат являє собою
планову собівартість розробки апаратного засобу й складається на весь обсяг
робіт.
Кошторис витрат
| Статті витрат |
Сума (грн.) |
Структура витрат, в % до
підсумку |
| 1. Матеріали
основні й допоміжні |
11000 |
3.4% |
| 2. Покупні
комплектуючі вироби |
11000 |
3.4% |
| 3. Амортизація
основних фондів |
6050 |
1.9% |
| 4. Витрати на
оплату праці |
82640 |
25.8% |
| 5. Відрахування
на соціальні програми |
32230 |
10.0% |
| 6. Інші витрати |
12400 |
3.9% |
| 7. Накладні
витрати |
165280 |
51.6% |
| Всього витрат: |
320600 |
100% |
Матеріали основні й допоміжні
На цю статтю ставляться витрати
на придбання й доставку основних і допоміжних матеріалів, необхідних для
дослідно-експериментального пророблення розв'язку, для виготовлення дослідного
зразка встаткування.
Сюди включаються як вартість
матеріалів, що витрачаються при виготовленні зразків, так і матеріалів,
необхідних для оформлення необхідної документації (ватман, калька, канцелярські
матеріали й т.п.). На цю статтю ставляться транспортно-заготівельні витрати по
їхній доставці. Розмір ТЗР визначається в % від вартості основних і допоміжних
матеріалів, прийнятих на підприємстві (у середньому 10%).
Розрахунки вартості матеріалів
| Найменування й марка
матеріалу |
Сума (грн.) |
Примітка |
| 1. Матеріали,
необхідні для оформлення документації |
3000 |
Усі необхідні матеріали
ухвалюються за умовну одиницю |
| 2. Матеріали,
необхідні для виготовлення дослідного зразка |
7000 |
|
| Разом витрат: |
10000 |
|
| 3. Транспортно-заготівельні
витрати |
1000 |
|
| Всього витрат: |
11000 |
|
Покупні комплектуючі вироби.
На цю статтю ставиться вартість
використовуваних при проробленні розв'язку мікросхем, рознімань, конденсаторів,
сполучних проводів і т.п.
Розрахунки вартості покупних
комплектуючих виробів
| Найменування комплектуючих
виробів |
Сума (грн.) |
| 1. Деталі
(список) |
10000 |
| Разом витрат: |
10000 |
| 2. Транспортно-заготівельні
витрати |
1000 |
| Всього витрат: |
11000 |
Амортизація основних фондів
По цій статті враховуються
витрати, пов'язані з експлуатацією при проробленні розв'язки спеціального
устаткування: комп'ютери, стенди, тестове встаткування й т.п. Розрахунки цих
витрат проводиться по формулі:
Вам= kб * На * Дт
/ Дq,
де:
kб – балансова
вартість устаткування, грн.,
На – річна норма амортизації на
повне відновлення,
Дт – тривалість
експлуатації встаткування при проробленні (дні),
Дq – дійсний
(ефективний) річний фонд часу (дні).
Розрахунки витрат на амортизацію
| Найменування устаткування |
Балансова вартість, грн. |
Норма амортизації, % |
Вартість амортизації на
тему, грн. |
| 1.Устаткування (список) |
150000 |
12.5% |
6050 |
| Всього: |
|
|
6050 |
Вам= 150000 * 0.125 ( (80/ 248)= 6050 грн.
Витрати на оплату праці
По статті враховуються виплати по
заробітній платі за виконану роботу, обчислені на підставі тарифних ставок і
посадових окладів, відповідно до прийнятої в організації-розроблювачі системою
оплати праці.
Крім того, по даній статті можуть
відбиватися премії за виробничі результати, надбавки й доплати за умови праці,
оплата щорічних відпусток, виплата по районних коефіцієнтах і деякі інші
витрати.
Взп= Зот * (1 + Кп + Кд + До + Кр),
де:
Зот– заробітна плата
відповідального виконавця по тарифу або окладі за відпрацьований час. (Зот= Тд
* Д, де Тд – середньоденна заробітна
плата виконавців, грн., Д – кількість днів, відпрацьованих виконавцем при
проробленні).
Кп – коефіцієнт
преміальних доплат, прийнятий в організації розроблювачі.
Кд – коефіцієнт, що
враховує надбавки й доплати за умови праці, прийнятий в
організації-розроблювачі.
До – коефіцієнт, що враховує оплату
щорічних відпусток, прийнятий в організації-розроблювачі.
Кр – коефіцієнт
районних доплат, рівний 0.15.
Розрахунки витрат на оплату праці
| Виконавці |
Кількістьвиконавців |
Сумарна трудомісткість
робіт з теми (дні) |
Денна тарифна ставка, грн. |
Сума тарифної заробітної
плати |
Загальна сума заробітної
плати |
| Інженер – перекладач |
2 |
34 |
300 |
23800 |
38080 |
| Інженер - системотехнік |
3 |
66 |
250 |
16500 |
26400 |
| Інженер – схемотехник |
1 |
37 |
200 |
7350 |
11760 |
| Інженер - конструктор |
1 |
20 |
200 |
4000 |
6400 |
| Всього: |
7 |
157 |
|
51650 |
82640 |
Відрахування на соціальні потреби
Стаття враховує відрахування
організації-розроблювача в позабюджетні державні фонди (пенсійний фонд, фонд
зайнятості, фонд соціального страхування й фонд обов'язкового медичного
страхування).
Всн= Взп* Нсн,
де:
Взп – сумарні витрати
на оплату праці, грн.
Нсн – норматив
відрахувань на соціальні потреби.
Всн= 82640 * 0.39 = 32229,60 грн., округляючи, одержимо:
Всн = 32230 грн.
Накладні витрати.
Стаття враховує витрати
організації-розроблювача на зміст апарата керування, що обслуговує персоналу,
витрати на охорону, зміст будинків і споруджень, поточний ремонт, витрати на
опалення й висвітлення й т.п.
Внр= Взп * Кнр,
де:
Кнр – коефіцієнт
накладних витрат, прийнятий в організації-розроблювачі.
Внр = 82640 * 2 = 165280 грн.
Інші витрати
Це стаття передбачає витрати, не
передбачені в інших статтях витрат, які можна віднести на дану тему прямим
рахунком. Це можуть бути витрати організації-розроблювача, пов'язані з
експлуатацією ОЦ, виробничими відрядженнями й т.п.
Він= Взп * Кін,
де:
Кін – коефіцієнт інших
витрат, приймемо його рівним 15%.
Він= 82640 * 0.15 = 12396, округляючи, одержимо:
Він= 12400 грн.
8. ТЕХНОЛОГІЧНА ЧАСТИНА. ТЕХНОЛОГІЯ ВИГОТОВЛЕННЯ ПАХ СТРУКТУР
У виробництві пристроїв, що працюють на акустичних хвилях, використається
фотолітографічний процес (рис.8.1); приблизно таким же способом виготовляються
інтегральні схеми. Єдина різниця полягає в тім, що в акустичних датчиках немає
переходів.
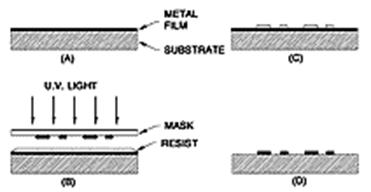
Рисунок 8.1 Фотолітографічний процес
При виготовленні акустичних сенсорів найбільше часто використаються
наступні п'єзоелектричні підкладки: кварц (Si2), танталат літію
(LiTa3) і трохи рідше ніобат літію (LiNb3). У кожного із
цих матеріалів є свої переваги й недоліки, пов'язані із ціною, температурною
залежністю, загасанням і швидкістю поширення. В таблиці 8 наведено коефіцієнти
чутливості деяких матеріалів, за якими можна визначити чутливість частоти
(періоду) ПАХ до зовнішніх впливаючих факторів: деформацій eij звукопроводу KeSpeij, його температури DT та обертання основи W:
Df/fn0»KeSpeij+KtDT+Kk×W/fn0–DL/L0.
Таблиця 8
Коефіцієнти чутливості звукопроводу ПАХ
| Матеріал
звукопроводу |
f0n,
МГц
|
Ke |
Kt×104, 0C
|
Kk |
| Експеримент |
Розрахунок |
Експеримент |
Розрахунок |
Експеримент |
Розрахунок |
|
ZnO-SiO2
|
82,0 |
5,7 |
4,53 |
61,45 |
48,25 |
-0,24 |
-0,22 |
|
a-SiO2
ST-зрізу
|
78,9 |
-0,87 |
-0,54 |
2,8 |
3,25 |
-0,44 |
-0,59 |
Слід зазначити, що анизотрорпні матеріали, у тому числі й кварц, володіють
такою властивістю: температурна залежність матеріалу залежить від кута зрізу й
напрямку поширення хвилі. Правильним підбором значень цих параметрів можна
мінімізувати температурний ефект першого порядку. Якщо максимізувати цей ефект,
то можна сконструювати акустичний датчик температури. Не можна сказати того ж
про ніобат й танталат літію, тому що при будь-яких зрізі матеріалу й напрямку
поширення хвилі зберігається лінійна температурна залежність. З інших
матеріалів, що мають комерційне застосування, слід зазначити: арсенід галію
(GaAs), карбід кремнію (Si), лангасит (LGS), оксид цинку (Zn), нітрид алюмінію
(Al), п'єзоелектричний титанат свинцю-цирконію (PZT), фторид поливинилидена
(PVd).
Для виготовлення датчиків використається фотолітографічний процес (див.
рис. 8.1). Зборка починається з полірування й очищення п'єзоелектричної
підкладки. Потім на підкладку рівномірно наноситься метал, як правило,
алюміній. Потім на пристрій методом центрифугирования наносять фоторезист, а
потім його задубливают з метою підвищення міцності. Потім ті області, які
повинні бути металізовані в остаточному підсумку, закриваються
світлонепроникним папером, і пристрій міститься під ультрафіолетове
випромінювання. В опромінених зонах відбуваються хімічні зміни, після яких їх легко
видалити за допомогою проявника. Нарешті, видаляється фоторезист, що залишився.
Малюнок металу, що залишився, і є зустрічно-штировий перетворювач. Ефективність
сенсора можна максимізувати за допомогою зміни довжини, ширини, товщини й
розташування перетворювача.
Фотолітографія, спосіб формування рельєфного покриття заданої конфігурації за допомогою
фоторезисту (спеціальний матеріал, що змінює свої фізико-хімічні властивості
при опроміненні світлом). Фотолітографія звичайно включає:
1) нанесення фоторезисту на метал, діалектик або напівпровідник методами
центрифугування, напилювання або сублімації;
2) сушіння фоторезисту при 90-110 0C для поліпшення його адгезії до підкладки;
3) експонування фоторезисту видимим або УФ випромінюванням через
фотошаблон (стекло, кварц й ін.) із заданим малюнком для формування схованого
зображення; здійснюється за допомогою ртутних ламп (при контактному способі
експонування) або лазерів;
4) прояв (візуалізацію) схованого зображення шляхом видалення фоторезисту
з опроміненої (позитивне зображення) або неопроміненої (негативне) ділянки шару
вимиванням водно-лужними й органічними розчинниками або сублімацією в плазмі
високочастотного розряду;
5) термічну обробку (дублення) отриманого рельєфного покриття (маски) при
100-200 0C для збільшення його стійкості при травленні;
б) травлення ділянок вільної поверхні травителями кислотного типу (напр.,
на основі HF, NH4F або CH3COOH) або сухими методами
(напр., галогеновмісткою плазмою);
7) видалення маски розчинниками або випалюванням кисневою плазмою.
Масштаб передачі малюнка фотошаблона звичайно 1:1 або 5:1 й 10:1 (при
проекційному способі експонування).
При виготовленні інтегральних схем процес повторюють багаторазово на
різних технологічних шарах матеріалу й при цьому кожний наступний малюнок
повинен бути сполучений із попереднім.
Часто для додання фоторезистному покриттю специфічних характеристик
(підвищення стійкості до травителей, зменшення відбиття випромінювання від
підкладки, планаризація рельєфу й ін.) формують багатошарові покриття, у яких
один із шарів, звичайно верхній, є власно фоторезистом, а інші мають допоміжні
функції. Двошарове покриття сформовано й в одношаровому фоторезисті шляхом
локальної хімічної модифікації поверхні.
Основними вимогами до фотолітографії:
-
висока
розв'язна здатність;
-
мінімальна
дефектність;
-
висока
продуктивність.
Існує кілька різновидів фотолітографії. Метод прямої фотолітографії
передбачає нанесення суцільної плівки матеріалу тонкоплівочного елемента,
формування на його поверхні фоторезистної контактної маски, втравлювання через
вікна у фоторезисті зайвих ділянок плівки. Контактна маска з фоторезисту або
іншого матеріалу, більш стійкого до наступних технологічних впливів, відтворює
малюнок фотошаблона із плівки.
Експонований фоторезист віддаляється (розчиняється) після чого плівка
резистивного матеріалу стравлюється з ділянок, не захищених фоторезистом. Далі
на підкладці у вакуумі наноситься суцільна плівка алюмінію. Після
фотолітографії й травлення алюмінію провідна плівка залишається в областях
контактних площадок і провідників. При цьому сформовані на попередньому етапі
резистори не ушкоджуються. Після нанесення поверх провідних елементів і
резисторів захисного шару скла проводиться ще одна, третя фотолітографічна
обробка, у результаті якої стекло віддаляється з областей над контактними
площадками, а також по периметрі плати.
Метод зворотної (підривний) фотолітографії відрізняється від попередніх
тим, що спочатку на підкладці формується контактна маска, потім наноситься
матеріал плівкового елемента, після чого виробляється видалення контактної
маски.
При фотолітографічному методі для виготовлення ГИС, що містять резистори
й провідники, використають два технологічних маршрути. Перший варіант -
напилювання матеріалу резистивної і провідної плівок; фотолітографія провідного
шару; фотолітографія резистивного шару; нанесення захисного шару. Другий
варіант - після проведення перших двох операцій, тих же що й у попередньому
варіанті, спочатку здійснюють фотолітографію й травлення одночасно провідного й
резистивного шарів, потім другу фотолітографію для підбурення провідного шару в
місцях формування резистивних елементів, після чого наносять захисний шар й
фотолітографію для розкриття вікон у ньому над контактними площадками.
9. ОХОРОНА ПРАЦІ ТА НАВКОЛИШНЬОГО СЕРЕДОВИЩА. ЗАХИСТ ВІД ВРАЖЕННЯ
ЕЛЕКТРИЧНИМ СТРУМОМ
Дiя електричного струму на оpганізм людини. Широке використання електроенергії у
всiх галузях народного господарства та у побуту приводить до значного
розширення кола осiб пов'язаних з експлуатацiєю електроустановок.
Електроустановками називається сукупнiсть машин, лiнiй, допомiжного
обладнання (разом з спорудами та примiщеннями, у яких вони встановленi),
призначенi для виробництва, перетворення, трансформацiї, передачi, розподiлу
електроенергiї та перетворення її у iншi види енергiї.
Порушення вимог електробезпеки при роботi на електроустановках, як правило,
приводить до електротpавм.
Електротpавма - травма, викликана впливом електричного струму або
електричної дуги.
Кількість нещасних випадкiв з смертельним наслідком при
електpотpавматизмі найбiльше (складає близько 40 %), при загальній кількості
біля 1%.
Виникнення електротpавм може бути викликано:
-
дотиком
до частин, що проводять струм;
-
дотиком
до апаратiв, що знаходяться у аварiйному режимi;
-
попаданням
пiд напругу кроку;
-
наближенням
до апаратiв високої напруги (поразка електричною дугою).
В порiвняннi з iншими видами нещасних випадкiв електротpавматизм має такi
особливостi:
Людина не може визначити дистанційно наявнiсть напруги. Електричний струм
дiє не тільки в місці контакту, а - на весь органiзм у цiлому. Людина може
отримати електротравму без безпосереднього контакту з струмопровідними
частинами ( попадання під напругу кроку, враження через електричну дугу). Види
дiї електричного струму.
Електричний струм може викликати:
- термiчну (опiк);
- хiмiчну (змiни складу кровi);
- механiчну (розрив тканин);
- бiологiчну (подразнення та порушення живих тканин органiзму, фібриляція
серця) та
інші дiї.
Електротравми бувають:
1. Мiсцевi електричні травми - електричні опiки, електричні знаки або
мiтки (круглi або овальні плями на тiлi у мiсцях входу та виходу електричного
струму), металізація шкiри, електроофтальмію (опiк роговиці очей).
2. Загальнi - електричний удар, при якому вражається весь органiзм через
порушення ноpмальної дiяльностi життєво важливих органiв. Проявляється у
виглядi фібриляції серця хаотичного скорочення волокон серцевих м’язів),
зупинки дихання та електричного шоку - своєрідна нервово-рефлекторна реакція
організму у відповідь на сильне роздратування електричним струмом.
Фактори, що впливають на наслідки враження електричним струмом. Характер дії електричного
струму на організм людини та важкість враження залежить від слідуючих основних
факторів: сили струму, протекаючого через тіло людини, тривалості його дії,
роду і частоти струму, шляху струму у тілі людини, індивідуальних властивостей
людини.
Сила струму, що проходить через тiло людини, (Ih), являється основним
фактором обумовлюючим наслідок враження. Різні по величині струми оказують
різну дію на організм людини.
Розрізняють відчутні, невідпускаючі та фібриляційні струми, порогові
значення яких приведені у таблиці 9.
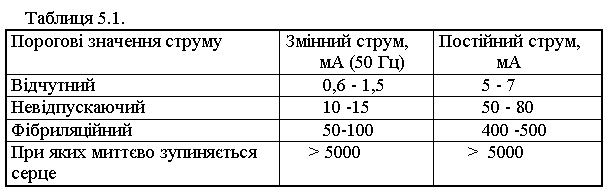
Невідпускаючий струмом характеризується тим, що при проходженні через
тіло людини, викликає судорожні скорочення м’язів руки, в яких зажат провід.
Фібріляційний струм характеризується тим, що при проходженні через тіло людини,
викликає - фібриляцію серця. Струм більш 5 А (50 Гц) як змінний так і постійний
викликає миттєву зупинку серця.
Опір тiла людини (Rh) визначається опором внутрішніх органів Rвн, та
опором зовнішніх шкіряних тканин Rз, Сз, причому опір шкіри складає основну
долю загального опору. Найбільший опір має верхній шар шкіри (епідерміс) і може
складати десятки кОм. Опір внутрішніх тканин тіла людини незначний і складає
300-500 Ом.
Так як при зволожені, забруднені та пошкоджені шкіри (потовиділення,
порізи, царапини і т. п.), збільшенні сили струму та часу його дії, збільшені
площі контакту з струмоведучими елементами опір тіла людини зменшується до
мінімального значення - опору внутрішніх органів а також при частоті струму 50
Гц ємнісні опори малі, то для розрахунків опір тіла людини приймають чисто
активним та рівним 1 кОм.
Напруга дотику (Uдот) впливає на наслідки враження. Чим вище напруга
дотику тим небезпека поразки бiльше, так як при напрузi бiльше 100 В
вiдбувається пробій зовнiшнього шкіряного покрову, загальний опір людини
зменшується і струм, протікаючий по тiлу, збiльшується.
Тривалість дії електричного струму в багатьох випадках є визначаючим
фактором, від якого залежить наслідки враження струмом: з збiльшенням
тривалостi впливу електричного струму загальний опір людини зменшується, тому небезпека
поразки збiльшується.
Залежнiсть мiж припустимими величинами струмiв і напруг залежно вiд часу
впливу електричного струму приведенi у ДСТ 12.1.038-82.
Рід та частота струму також впливає на наслідки враження. При напрузi до
500 В змiнний струм у 4-5 разiв небезпечнiше постiйного. При бiльш високій
напрузi - постiйний струм бiльш небезпечний через можливостi загоряння
електричної дуги.
Найбiльш небезпечний електричний струм частототою до 200 Гц. Пpи бiльш
високих частотах струм сприймається як постiйний і небезпечність враження
помітно знижується.
Шлях струму у органiзмi людини суттєво впливає на наслідки враження.
Небезпечність враження особливо велика якщо струм проходить через життєво
важливі органи - серце, легені, головний мозг та безпосередньо діє на ці
органи. Виділяють два основних дотику людини до струмоведучих частин:
однополюсний та двополюсний. При однополюсному дотику людина доторкається до
одної з фаз електроустановки яка знаходиться під напругою, при двополюсному -
до двох фаз електроустановки одночасно.
Умови оточуючого середовища визначають ступень небезпеки враження людини.
Згідно ПУЕ приміщення по характеру навколишнього середовища поділяють на:
нормальні, сухі, вологі, сирі, особливо сирі, жарові, пилові, та з хімічно активною
середовищем.
До сухих відносяться приміщення, відносна вологість яких не привищує 60%.
Вологими вважаються приміщення, в яких волога виділяється непостійно а в
невеликих кількостях, а відносна вологість складаю більш 60-70%.
Сирими ї приміщення , відносна вологість яких довгий час привищує 76%.
Особливо сирими називаються приміщення, відносна вологість яких близька
до 100% (стеля, стіни, підлога покриті вологою). До жарких відносяться
приміщення, температура яких під дією різних теплових випромінювань перевищує
постійно чи періодично (більш доби) +300С.
Пиловими вважаються приміщення, у яких по умовам виробництва виділяється
технологічний пил у такій кількості , що може осідати на проводах , проникати в
середину машин апаратів і т. п. Пилові приміщення поділяють на приміщення з
струмопроводячим та неструмопроводячим пилом.
В приміщеннях з хімічною активним чи органічним середовищем постійно чи
на протязі тривалого часу мають місце агресивні пари, гази, рідини які діють на
ізоляцію та струмоведучі частини електрообладнання.
По ступені небезпечності враження людей електричним струмом всі
приміщення підрозділяються на три категорії: приміщення без підвищеної
небезпеки; приміщення з підвищеною небезпекою та особливо небезпечне
приміщення.
В приміщеннях без підвищеної небезпеки відсутні умови які утворюють
підвищену чи особливу небезпеку. До них відносяться адміністративні приміщення,
дільниці програмістів, операторів обчислювальної техніки і т. п.
Для приміщень з підвищеною небезпекою характерно наявність одного з
слідуючих умов: сирість чи струмопроводячий пил; струмопроводяча підлога,
висока температура; можливість одночасного дотику людини до маючих з’єднання з
землею металоконструкціями будинків, технологічним апаратам , механізмам і т.
п. - однієї сторони, і до металевих корпусів електрообладнання - з другої.
До цієї категорії приміщень можна віднести: монтажне приміщення
радіоелектронної апаратури, приміщення механічної, електрофізичної обробки металів,
друковані цехи та інші.
Особливо небезпечні приміщення характеризуються наявністю одного з умов,
утворюючих особливу небезпечність: особлива сирість; хімічно активне
середовище, а також при одночасної наявності двох та більше умов підвищеної
небезпеки (гальванічні, травильні, зварювальні та інші подібні відділення).
Так як робоча напруга впливає на наслідок враження при дотику людини до
струмоведучих частин, то значення напруги повинно відповідати призначенню
електрообладнання та характеру навколишнього середовища. Так для живлення
електропроводів виробничих машин і верстатів допускається напруга 220, 380 та
660 В. Для стаціонарних освітлювальних установок - до 220 В; для ручних
світильників і ручного інструменту в приміщеннях особливо небезпечних - до 12
В, а в приміщеннях з підвищеною небезпекою - до 36 В.
Індивiдуальнi особливостi та стан органiзму людини впливає на наслідки
враження електричним струмом. Струм, викликаючий незначні відчуття у одної
людини , може бути невідпускоючим для іншої. Характер дії струму однієї
величини залежить від маси людини , його фізичного розвитку та темпераменту.
Для жінок порогові значення струму приблизно у півтора рази нижче, ніж для
чоловіків. Ступень дії струму залежить від стану організму. Так, у стані
стомлення і сп’яніння люди значно більш чуттєві до дії струму. Установлено, що
фізично здорові люди переносять електричні удари, ніж хворі. Підвищене
сприйняття до електричного струму мають люди, якi страждають захворюваннями
серця, шкiри, легких та нервами.
Класифiкацiя електричних мереж, що застосовуються у промисловості
Згiдно ПУЕ мережi дiляться:
- по напрузi: до 1000В (~220В; ~380В) та бiльш 1000В (6, 10, 35, 110,
220кВ і т. п.)
- по кiлькостi фаз: однофазні та багатофазні;
- по кiлькостi проводiв: одно, 2-х, 3-х та 4-х пpоводові;
- по режиму нейтpалі трансформатора напруги: з ізольованою та заземленою
нейтpаллю трансформатора напруги.
Захист від враження електричним струмом. Класифiкацiя захисних заходів
Безпека експлуатації електрообладнання забезпечується комплексом заходів,
які можна поділити на три класи:
1. Технічні захисні заходи, які запобігають дотик людини до струмоведучих
частин, що знаходяться під напругою.
2. Технічні захисні заходи, які знижують ступінь поразки людини при
дотику його до струмоведучих частин, що знаходяться під напругою.
3. Організаційні захисні заходи.
Технічні захисні заходи, що запобігають дотик людини до струмоведучих
частин, що знаходяться під напругою. Дані заходи не допускають людину у небезпечну зону
(простір), де діють небезпечні та шкідливі виробничі фактори. До них
відносяться: огорожі, висота розміщення не огороджених струмоведучих частин,
ізоляція струмоведучих частин, блокування, зорова інформація про небезпеку.
Технічні захисні заходи, що знижують ступінь враження людини при дотику
до струмоведучих частин. Основними такими заходами є: використання малих напруг, занулення,
захисне заземлення, відключення, застосування електрозахисних засобів.
Організаційні захисні заходи. Організаційні захисні заходи
складаються з вимог технічної експлуатації та технічної безпеки при організації
обслуговування електричних мереж та електроустановок.
Вимоги до персоналу складаються з оцінки пригодності персоналу при
прийманні на роботу та періодичного медичного посвідчування.
До роботи у електроустановках допускаються особи до 18 літнього віку
пройшовші інструктаж та правилатехніки безпеки ТБ, перевірку знань правил ТБ та
інструкцій у відповідності з займаємою посадою стосовно до роботи, яка
виконується з присвоєнням відповідної кваліфікаційної групи по ТБ (I-IV).
Організація робіт. Організаційними заходами, що забезпечують безпека при
виконанні робіт у електроустановках є: оформлення роботи, допуску до роботи,
нагляд під час роботи, оформлення перерв та переведень на інші види робіт.
Відповідальним за безпеку роботи є: особа, що видє
наряд або розпорядження, допускаюча до робіт, відповідальний керівник робіт,
спостерігаючий та члени бригади. Видачу нарядів та розпоряджень проводять
особи, відповідальні за електрогосподарство підприємства, що мають не нижче
четвертої кваліфікаційної групи для електроустановок до 1000 В.
Технічні заходи проводяться при проведенні робіт з зняттям напруги у
діючих електроустановках або поблизу них: відключення установки, механічне
запирання приводу комутаційнних апаратів, зняття запобігачів, установка знаків
безпеки, огорож робочого місця та установка предписуючих знаків безпеки.
ВисновоК
В роботі розроблено новий перспективний малогабаритний, за розмірами
термодатчик на акустичних хвилях , який дозволяє вимірювати температуру з
пороговою чутливістю 0,2 мсек, запізненням показів (тепловою інерцією) біля 15
сек, що на рівні термодатчиків класичного типу. Однак завдяки невеликій вартості
і можливості автономної роботи без додаткових внутрішніх джерел енергії
розроблений прилад знайде широке застосування в автомобільній, авіаційній
індустрії й індустрії телекомунікацій.
Показано робото здатність термодатчика на пасивних акустичних хвилях. Вибрано
серед можливих варіантів побудови в якості базового варіанту побудови прилад на
поверхневих акустичних з одним зустрічно-штирьовим перетворювачем та декількома
рознесеними відбивачами, сформованими на поверхні кварцової підложки методом фотолітографії.
Вибрано серед інших імпульсний режим опитування термодатчика
радіолокаційним методом як найбільш надійний в умовах перешкод проходженню
сигналу та найбільш простий для детектування РЛС малої потужності.
В межах роботи узагальнено розробки датчиків на пасивних елементах,
визначено основні параметри та розрахункові залежності, які дозволять в
подальшому більш детально порівняти існуючі типи пасивних термодатчиків і
визначити їх можливості.
ВИКОРИСТАНА ЛІТЕРАТУРА
1.
Г.С. Остапенко.
Усилительные устройства: Учеб.пособие для вузов. – М.: Радио и связь, 1989.
2.
Датчики.
Справочник. Под ред. З.Ю. Готры и О.И. Чайковского. – Львов: Каменяр, 1995.
3.
Е.С. Левшина,
П.В. Новицкий. Электрические измерения физических величин: (Измерительные
преобразователи). Учеб. пособие для вузов. – Л.: Энергоатомиздат. Ленингр.
отделении, 1983.
4.
Задачник по
кристаллофизике. Н.В. Переломова, М.М. Тагнева. – М.: Наука, 1982.
5.
И.Зеленка.
Пьезоэлектрические резонаторы на объемных поверхностных акустических волнах. – М.:Мир,
1990.
6.
Измерительные
преобразователи. Е.С. Полищук. – Киев: Вища школа. Головное изд-во, 1981.
7.
Малов В.В.
Пьезорезонансные датчики. - Москва: Энергоатомиздат – Дания, 1989. -272 с.
8.
Машиностроительное
черчение: Учебник для студентов машиностроительных и приборостроительных
специальностей вузов / Г.П. Вяткин, А.Н. Андреева, А.К. Болтухин и др. Под ред.
канд. техн. наук проф. Г.П.Вяткина. – 2-е изд., перераб. и доп. – М.:
Машиностроение, 1985.
9.
H.
Wohltjen et al. 1997. Acoustic Wave Sensor—Theory, Design, and Physico-Chemical
Applications, Academic Press, San Diego:39.
10.
M.
Schweyer et al. 1997. “A Novel Monolithic Piezoelectric Sensor,” Proc
Ultrasonics Symposium, Vol. 1:371-374.
11.
C.
Wold et al. 1991. “Temperature Measurement Using Surface Skimming Bulk Waves,”
Proc Ultrasonics Symposium, Vol. 1:441-444.
12.
. U.S.
Patent No. 11/677664, February 22, 2007. – 13 р.
13.
Leonard Reindl . Wireless
passive radio sensors / Germany IEI Leibnizstr - Claustral University of
Technology. – 6 p.